
Kövesse az Indexet Facebookon is!
Követem!További Hardver cikkek
Mit tanulhatunk a Nexi névre hallgató, tágra nyílt szemű, beszélő robottól a bizalomról? Egy interdiszciplináris – robotfejlesztőből, közgazdászból, pszichológusokból álló – amerikai kutatócsoport szerint sokkal többet, mint elsőre gondolnánk.
A Northwestern University (Boston) pszichológiaprofesszora, David DeSteno és munkatársai vizsgálatának tárgya, hogy miként döntünk arról, megbízunk-e idegenekben, és vajon helyesek-e ezek a döntések. Az amerikai Nemzeti Tudományos Alapítvány (NSF) által támogatott projektben Cynthia Breazeal, a világhírű MIT Médialaboratórium Személyi Robotok Csoport vezetője, valamint a Cornwall Egyetem két tudósa, a közgazdász Robert Frank és a pszichológus David Pizarro is részt vesznek.
Elsősorban nem verbális megnyilvánulásainkról, gesztusainkról akarnak minél többet megtudni. Mennyiben befolyásolnak olyan döntésekben, hogy hiszünk, megbízunk valakiben, vagy sem? „Egymás testbeszédét igyekszünk utánozni” – elmélkedik DeSteno. – „Ez a szándék segíthet a mások érzéseire vonatkozó intuíciók kifejlődésében. Intuíciók, melyek alapján igazságosak vagyunk hozzájuk.”
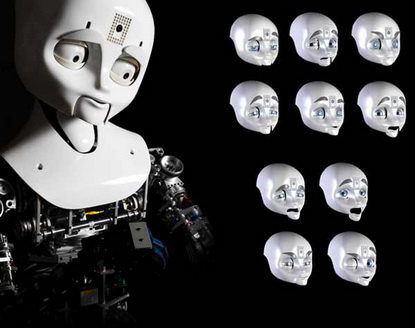
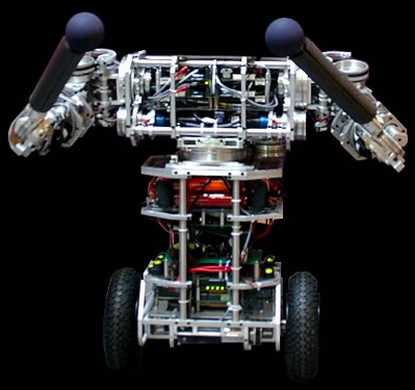
De mi köze mindezeknek a robotikához? Annyi, hogy az elméleteket az MIT beszédes mobil robotján, Nexin tesztelik. A „kollégáihoz” képest fejlett interakciós adottságokkal rendelkező gépet (és több társát) emberközpontú kommunikációra, együttműködésre tervezték. Ezúttal humán partnerekkel érintkezve, a kísérlet résztvevői döntik el, megbíznak benne, vagy sem. A tesztalanyok természetesen nem ismerték korábban, így programozásáról sem tudtak – történetesen arról, hogy beszéd közben gesztusokat végez majd. Ezek a gesztusok alapján fog megbízhatónak, vagy az ellentétjének tűnni.
„Az összes megnyilvánulásában kontrollálható humanoid robot használata lehetővé teszi az idegenek megbízhatóságára vonatkozó előrejelzésekhez szükséges pontos fogódzók és lélektani folyamatok azonosítását, azokat a fogódzókat és folyamatokat, amelyek megalapozzák ezt az adottságunkat” – indokolja a választást DeSteno.
A kísérlet első részeként Nexi mintegy tíz percig kifejezetten elfecseg beszélgetőpartnerével. Különböző témák kerülnek szóba: utazás, hova való, mit szeret leginkább Bostonban, és ha odavalósi, mit tart a legjobbnak abban, hogy az észak-amerikai nagyvárosban él. A cél testbeszéddel kísért átlagos társalgás szimulálása, miközben elménk intuitív módon figyeli, bízzunk-e a másikban.
A folytatásban „adj valamit” típusú gazdasági játékkal mérik fel Nexit: mennyi pénzt bocsátana a partner rendelkezésére, mennyiről mondana le, lemondana-e egyáltalán mások javára saját anyagi előnyeiről. Mivel az ilyen egyezkedések két-, illetve többoldalú játszmák, a humán partnernek, partnereknek is el kell dönteni, mennyi pénzt adnának a robotnak. A lehetséges kimenetek a játékelméletből, fogolydilemmából ismertek: komolyabb profit az egyiknek, nagyobb veszteség a másiknak, vagy relatíve kisebb, de azonos nyereség mindkettőnek.
A bizalmat nem egyetlen gesztus, hanem inkább az egymást nem ismerő felek összjátéka, a pszichológus szavaival együttes tánca határozza meg, az vezet a másikkal szembeni pozitív, illetve negatív hozzáálláshoz.
A következő lépésben azt fogják vizsgálni, hogy Nexi betanítható-e a partnerhez fűződő bizalom, vagy bizalmatlanság előrejelzésére.
Kövesse az Indexet Facebookon is!
Követem!