
Kövesse az Indexet Facebookon is!
Követem!További Hardver cikkek
A drónok az elmúlt évek egyik legnépszerűbb fejlesztési irányát jelentő ember nélküli légi járművek (UAV-k) kategóriába tartozó robotszerkezetek. Katonai műveleteknél felettébb hasznosnak bizonyultak. Úgy tűnik, hamarosan nemcsak hadászati célokat fognak szolgálni.
A civil életben gyakorlatilag csak a mezőgazdaságban (a termés felmérésére) és meteorológiai mérésekre használnak drónokat. A legfőbb problémát méretük és az a tény jelenti, hogy akadályok körül nehezen manőverezhetők. A katonai UAV-k (unmanned aerial vehicles) kötött szárnyai azért nem okoznak gondot, mert eleve olyan magasságra tervezték őket, ahol nem számít a kvázi-manőverezhetetlenség. Ugyanezek a drónok viszont kifejezetten veszélyesek lennének magas lélekszámú nagyvárosi környezetben: könnyen nekimennének fáknak, épületeknek, vagy navigációs útmutatás hiányában egyszerűen lezuhannának.
Mivel köz- és magánterületek folyamatos monitorozása egyre fontosabb és kritikusabb kérdés, nyilvánvalóan tágulni fog a drónok alkalmazási köre. A mobil sokszenzoros megfigyelő-rendszerek – egy-egy szituációt kielemzendő – gyorsan munkába állíthatók, azaz növelik az adott szituáción dolgozó biztonsági csoport hatékonyságát.

Ráérezve a piaci potenciálra, európai kutatócsoportok, fejlesztőcégek és üzleti partnerek részvételével, 2007-ben indult a környezetüket érzékelő, mozgó akadályokat kikerülő könnyen manőverezhető piciny drónok létrehozását célzó μDrones (Micro Drone Autonomous Navigation and Environment Sensing) projekt.
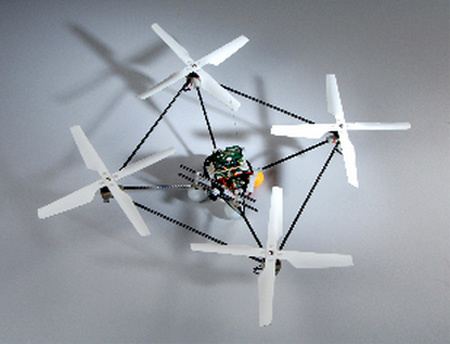
A prototípus
Szenzor- és robottechnológiát összekapcsolva, a kutatók számos alkalmazást fejleszthetnek ki rájuk. Az új drónok autonóm módon hajtanak vége küldetéseket nagyvárosi közegben, épületek belsejében. Semmivel nem ütköznek össze, senkinek nem mennek neki repülés közben.
A jelenlegi prototípus, a német AirRobot által fejlesztett mini UAV átmérője fél méter, tömege nem éri el az egy kilót, mintegy kétszáz gramm szállítására képes. Négy propellerével parányi helikopterre hasonlít – a propellerek teszik lehetővé a két legfontosabb vertikális mozgást, a fel- és a leszállást. Az emberi sérüléseket, baleseteket és a meghibásodást megelőzendő, a gépre (szalagszerű) védőburkolatot szereltek.
Hardverét és szoftverét úgy alakították ki, hogy légi pozícióját mindig lokalizálja, automatikusan navigál, nem várt helyzetekre (például akadályokra) reagál. A küldetés-tervezést, ütközés-elkerülést és a röppálya-meghatározást beépítették a rendszerbe. Memóriatérképe lehetővé teszi, hogy a korábban megtett útvonal alapján visszatérjen a kiindulási pontra.
Kétféleképpen navigálható: manuálisan és autonóm módon. Vagy a földfelszínről irányítjuk, vagy emberi irányítás nélkül, önmagától követi az előre meghatározott útvonalat. A manuális kontroll a küldetés függvényében ki- és bekapcsolható. A szoftver és az interface könnyen kezelhető, azaz, az operátor különösebb technikai ismeretek nélkül képes sikeresen navigálni.
Rendőrség, biztonság, tűzoltóság
Alkalmazások több területen várhatók. Három emelhető ki közülük.
A rendőrségnek nagy szüksége lenne ilyen szerkezetekre. Meghatároznák lázongások, tömegdemonstrációk színterét, hogy hova vezényeljenek ki speciális alakulatokat. Távirányított UAV-k bűnügyek helyszínén, akár épületek belsejében is kutakodhatnának anélkül, hogy veszélyeztetnék a nyomozók munkáját, testi épségét.
Biztonsági tevékenységeknél szintén fontos szerep vár rájuk. Egyrészt betörések, illegális behatolások detektálásakor sokkal gyorsabban mozognának, mint a szárazföldi robotok és az őrök. Másrészt folyamatosan monitorozhatnának helyszínt: repülőtereket, fúrótornyokat, közterületeket stb.
A tűzoltóságnak is besegíthetnek: azonosítják a bajt, terjedését, illetve azokat a helyeket, ahol a leggyorsabb beavatkozás szükséges. A projektet irányító konzorcium novemberben, görögországi tűzvédelmi feladatok során teszteli először a miniatűr UAV-t.
„A piacnak szüksége van ilyen gépekre" – jelentette ki Christophe Leroux koordinátor. – „Termékünk iránt máris sok végfelhasználó érdeklődik."
Kövesse az Indexet Facebookon is!
Követem!