

Magyarok tesztelték az első európai marsjárót
Kövesse az Indexet Facebookon is!
Követem!További Tech-Tudomány cikkek
Az Európai Űrügynökség (ESA) 2020-ban startoló ExoMars rover nevű űreszköze lesz az első olyan robot a bolygón, ami 2 méter mélyre is lefúrhat a felszín alá. Az onnan kiemelt mintát elemezve következtet a Mars egykori lakhatóságára, az ősi élet előfordulási esélyeire. Közel ez az a mélység, ahová már a kozmikus sugárzás töltött részecskéi sem hatolnak le – itt változatlan állapotban lehetnek az egykori szerves molekulák, talán életnyomokkal együtt.
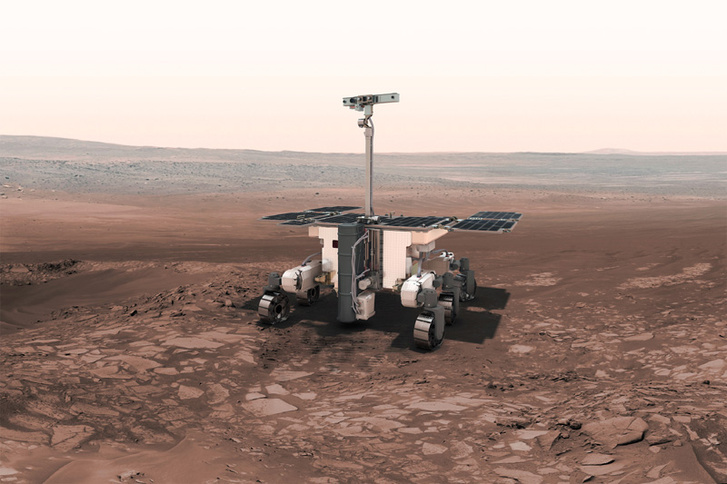
Fantáziarajz az „igazi” ExoMars 2020 roverről a vörös bolygó felszínén
Fotó: Csillagaszat.hu
Az első, valóban fúrni képes rover a Marson
Az ExoMars 2020 programban az MTA közreműködő szakemberei a földtani adottságok megértésében és az üledékes szemcsék várható jellemzőinek becslésében működnek közre. Akárcsak a Földön, a Marson is kritikus a mintavételi helyszín egykori környezetének megértése. Nem mindegy, hogy folyóvíz, tó, szél vagy jég szállította oda a vizsgált anyagokat. A klasszikus „sétáló geológus” feladata ez a Földön: ő adja a kontextust, amelyben a modern műszerek eredményei helyesen értelmezhetőek. Annak megértéséhez, hogy a rover által fúrt lyuk falának ismerete miként segíti az ilyen munkában, egy hazai kutatóprogram működik közre az ESA földi tesztelésein.
Utóbbi október végén zajlott közel két héten keresztül a dél-spanyolországi Tabernas-sivatag kopár vidékén, amelyben Kereszturi Ákos, az MTA Csillagászati és Földtudományi Kutatóközpontjának tudományos főmunkatársa vett részt. Az ilyen, úgynevezett analóg területeken valamely egyedi jellemző emlékeztet a marsbélire, de a többi körülmény nem hasonlít a vörös bolygón jellemzőhöz – azonban megfelelően tervezett kísérletek hatékonyan végezhetők itt is, hogy kipróbálják és teszteljék a módszereket.
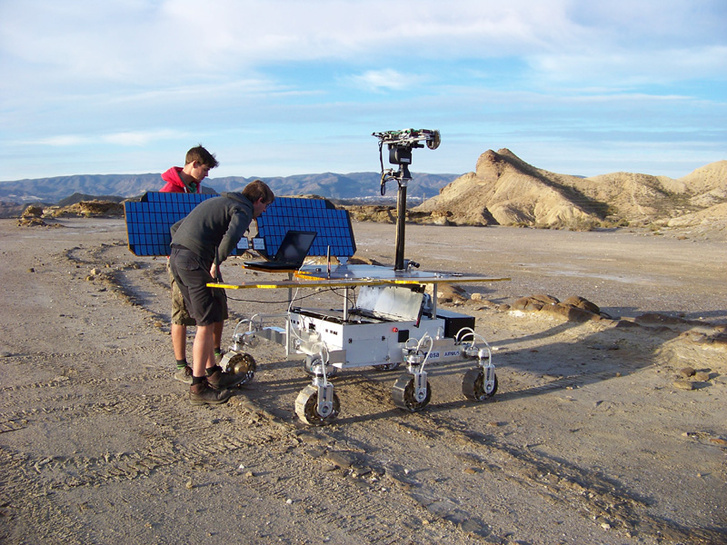
A szimuláció során használt teszt rover
Fotó: Csillagaszat.hu
A teszten a rover autonóm irányítását, mozgás közben hozott döntéseit és a kamerarendszer ezt támogató működését elemezték. A rover ezért kicsit soványabb volt a végsőnél, sok műszer helyét csak nehezékek töltötték ki. A kérdéses száraz területen üledékes kőzetek alkották a sík területet, csak kőzettörmelék és sok helyen kiszáradt agyag, valamint fehéres sókristályok borították a felszínt.
A mérnökök időnként a roveren babráltak, majd a domb mögé húzódva figyelték, miként végzi a munkát, és jelzi az elvégzett feladatokat rádión a „Földnek”. Egy véletlenül erre tévedő turista ilyenkor a roveren kívül csak azt a rámpát találta volna, amelyről az űreszköz a legurulást gyakorolta – a közeli domb mögött azonban három nagy sátor, áramtermelő aggregátorok, és egy tucat szakember figyelte az eseményeket, végzett kiegészítő méréseket.
Magyar közreműködés
Magyarország a programban a földi analógiák vizsgálata, valamint laboratóriumi mérések révén vesz részt. Ezek keretében különböző teóriákat elemeznek, miként ismerné fel a rover a rendelkezésre álló műszerekkel, hogy például egykori tómedret vagy folyóvízi anyagot, esetleg gleccserek avagy szél szállította törmeléket fúr meg.
Fontos része a magyar közreműködésnek egy speciális furatlyuk-fal térképező műszer elkészítése, amelynek képességeit és működését földi laborok mellett korábban a Szahara marokkói részén , illetve az Atacama-sivatagban is tesztelték.

A szimuláció helyszíne: a balra látható síkság közepén húzódó kőzetkibukkanás volt a fő célpont, mellette a rover azonosítható, a kép közepétől kicsit lefelé a platform látszik, amelyről legördült a szerkezet. Jobbra pedig a domb mögött a műszaki sátrak, a tesztet végső személyzettel és egyéb felszerelésekkel helyezkednek el.
Fotó: Csillagaszat.hu
A spanyol kutatómunka hátterében egy összetett program áll, amelyet az NKFIH a korábban nyert pályázattal támogatja. A rover terepi tesztelésében egy magyar fejlesztésű műszerrel, a már említett furatlyuk-fal térképezővel veszünk részt – emellett laboratóriumi munka és marsi adatok elemzése is zajlik a háttérben. Az elméleti munka a Csillagászai Intézetben, a kapcsolódó labormérések a Földtani és Geokémiai, illetve a Földrajztudományi Intézetben történnek.
A spanyol mérések alapján sikerült a célkőzet szemcseméretét azonosítani, a három fúrás közül az egyik helyszínen rétegeket elkülöníteni, azok viszonyát jellemezni. Néhol bepárolódással keletkezett fehéres evaporit ásványok is mutatkoztak, időszakosan nedves, de többnyire igen száraz környezetre utalva.
Ezek az ismeretek akkor értékesek, ha a távérzékeléses adatokból kapott földtani környezet jellemzőibe sikerül integrálni – esetünkben rétegzett homokkő kibukkanások voltak a vidéken, amelyek sekélytengeri környezetben rakódtak le. A területen egykori szél és folyóvíz nyoma nem mutatkozott, azonban a víztartalmú agyagásványok, karbonátok és vas-oxid ásványok az élet számára kedvező ősi környezetre utalnak. Mindez persze a Földön nem meglepő, de minél több különböző helyszínt vizsgálunk ilyen módon, annál jobban meg tudjuk majd becsülni, milyen lehetett az a marsi környezet, amelyről a rover méréseket küld a Földre.
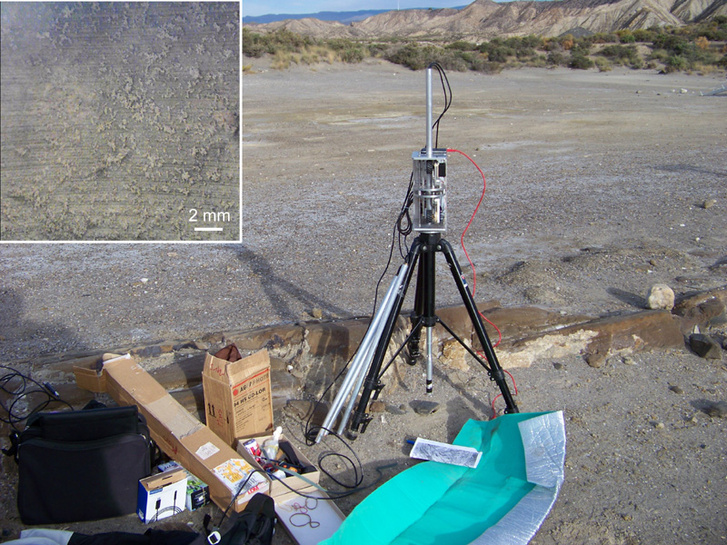
Az egyik furatlyuk felett a magyar műszer, balra fent egy példa az ekkor készült képekből. Megfigyelhetők a fúrás közel vízszintesen futó karcolásai, valamint a falra tapadt szemcsék.
Fotó: Csillagaszat.hu
A programban magyar oldalról kutatók, mérnökök és diákok vesznek részt, Kereszturi Ákos (MTA CSFK) vezetésével. A módszerek kifejlesztésében korábbi földtani fúrási tapasztalataival Maros Gyula (MBFSZ), mechatronikai javaslatokkal Gróf Gyula (BME), a műszer programozásával és tervezésével Gyenis Ákos (Korall Print BT és BME) vezetésével Tiegelmann Péter (BME), valamint Gyenis Tamás és Kovács Bálint diákok működtek közre. A laborméréseket és a képmozaikok összeállítását Kapui Zsuzsanna (MTA CSFK FGI) készíti Pál Bernadett (MTA CSFK CSI) automatizált szoftveres képfeldolgozása után. Skultéti Ágnes (MTA CSFK FTI) a kinyert minták infravörös elemzésében segít, Újvári Gábor (MTA CSFK FGI és GGI) pedig a földi analógiák megértésében vesz részt, míg a rover tervezett leszállóhelyét (Oxia Planum, Mars) Steinmann Vilmos (ELTE) hallgató vizsgálja térinformatikai programokkal.
A csapatmunka eredménye révén javaslatok születnek az ExoMars terepi munkájának tervezése, optimalizálása és utólagos értelmezése számára. A távolinak tűnő marsfelszíni vizsgálatok nem csak tudományos eredményeket hozhatnak – ha idővel beérnek a fejlesztések, gazdasági haszon is születik. A műszerezettség létrehozásához olyan mechanikai és minta előkészítési módszerek, az infravörös és Raman mérések automatizálását segítő eszközök, valamint extrém körülmények között is működő háttér elektronika születik, amelyek a szokatlan igények (rendkívüli marsi viszonyok) nélkül nem jöttek volna létre. Utóbbi olyan tudást ad, ami innovációval jár a kutatómunkában résztvevő országoknak.
Kövesse az Indexet Facebookon is!
Követem!
