
Kövesse az Indexet Facebookon is!
Követem!További Hardver cikkek
Mivel a gépek nem pontosak statikus és mozgó objektumok észrevételében, és megbízható tárgydetektálás nélkül haloványabban teljesítenek, autonóm mobil robotok és intelligens megfigyelőrendszerek fejlesztése is a vártnál lassabban megy.
Egy lokalizálásra és a hely feltérképezésére kiválóan alkalmas új innovatív technológiának köszönhetően felgyorsíthatók a fejlesztések. Az innováció a radarhoz hasonló elven működő (annak optikai megfelelője), csak magasabb frekvenciájú elektromágneses sugárzást kibocsátó és fogadó LIDAR (Light Detection and Ranging) technológiát gazdagítja. A LIDAR rendszerek szórt fény visszavert sugarai alapján lokalizálnak tárgyakat. Tevékenységük egy lépésből álló folyamat: átvizsgálják az adott területet, és megmérik a fényimpulzus kibocsátása és a visszaverődő jelzés közti eltérést.
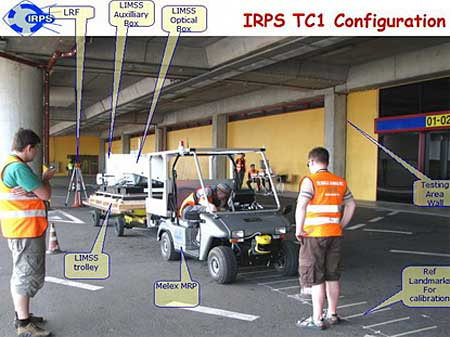
A tavaly december végén zárult EU-s IRPS (Intelligent Robotic Porter System) projekt résztvevői a folyamatba beiktattak egy előzetes lépést is: LIDAR segítségével 3D-s térképet készítenek a helyszínről, lehetővé téve, hogy rendszerük statikus mellett mozgó objektumok és személyek térbeli pozícióját is pontosan megállapítsa. A kalibrációt valósidejű navigáció követi. A 3D LIMS (3D LIDAR Imaging and Measurement System) technológia a jövőben olyan területeken kerülhet alkalmazásra, mint például autonóm járművek reptéri navigálása, ipari berendezések monitorozása, vagy kifejezetten biztonsági rendeltetésű megfigyelőrendszerek.
A 3D LIMS nemcsak pontosabban detektál objektumokat, de – ellentétben a kameraalapú robotikai látórendszerekkel – működését nem zavarja eső, köd, árnyék stb. Minden egyes pixelről szögeket és távolságokat tartalmazó információt ad. Elvileg bármilyen környezetben hasznosítható.
Alkalmazások
A technológia lehetőségeivel kísérletezve, az IRPS csapat prototípus-alkalmazást fejlesztett: a jövőben utasok csomagjait szállító targoncaszerű reptéri autonóm jármű navigálására használták. A tesztre tavaly decemberben, a portugáliai Faro repülőterén került sor. A robothordárhoz először a helyszín 3D-s képét készítették el, amire azért volt szükség, hogy ne csak az egész terepet, hanem annak statikus elemeit (falak, oszlopok stb.) is ismerje. Így a beépített LIDAR-ral rendelkező járművek kiszámíthatták, hol vannak, valamint észrevehették a menet közbeni akadályokat.
„Elképzelésünk szerint, idővel, (idős vagy fogyatékkal élő) személyek a repülőtérre érve, mobiltelefonon vagy PDA-juk webes interfészén keresztül közlik a hordárirányító-központtal, hogy a becsekkolásig szükségük lenne egy járműre” – vetíti előre a jövőt Maurice Heitz, projektmenedzser. – „A jármű emberi vezető nélkül, autonóm módon szállítaná őket, miközben az olyan mozgó objektumokat is kikerülné, mint az utasok és a csomaghegyek.”

Heitz szerint a nagyméretű modern repülőterek üzemeltetői részéről egyre sürgősebb igény mutatkozik egy ilyen rendszer iránt. A robothordárok mindennapos használatára azonban még sok évig kell várni – addig minden bizonnyal, amíg eleget nem tesznek az összes biztonsági és biztonságossági követelménynek, márpedig a jelenlegi technológiák alkalmatlanok erre. A 3D LIMS futtatásához hatalmas feldolgozási kapacitás, és természetesen komoly anyagi befektetés is szükséges.
Más alkalmazási területeken hamarabb – két-három éven belül – kereskedelmi forgalomba kerülhet a rendszer. Biztonsági megfigyelőrendszerekkel integrálva, betolakodók és épületen belüli változások egyaránt jobban észrevehetők lesznek, mintha csak a ma forgalomban lévő technológiákat használnánk. Ipari berendezések monitorozásánál szintén nem kell túl sokáig várni rá, és például erőművekben azonnal és pontosan ki fogja mutatni a legcsekélyebb rendellenességet is.
Kövesse az Indexet Facebookon is!
Követem!
