
Az űrből irányítottak egy földi robotot
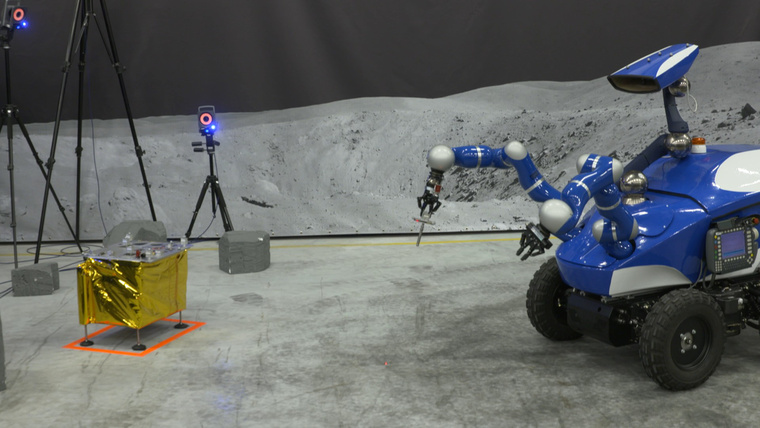
Beletenni egy apró tárgyat egy lyukba nem is tűnik nagy feladatnak, kivéve akkor, ha a tárgy a Földön van, az irányító pedig 400 kilométerrel feljebb, a Nemzetközi Űrállomáson. Andreas Mogensen, az Európai Űrügynökség űrhajósa az űrállomásról irányított egy robotot.

Fotó: esa
Egy olyan irányítóeszközt használt erre, amit az ESA fejlesztett ki. A visszacsatolással az űrhajós érezte, amikor a robot karja ellenállásba ütközik. Nagyon fontos volt a visszacsatolás, hiszen a fémből készült hat milliméteres csavart egy apró lyukba kellett helyezni. Ráadásul négy centiméter mélyre kellett dugni, hogy elektromosan is kapcsolódjon.
Andreas Mogensen korábban még nem használta a robotot. Első kísérletre 45 percig tartott, míg a roverrel eljutott a célhoz és elhelyezte a csavart. A második alkalommal mindezt tíz perc alatt elvégezte.
A robot 4x4-es hajtású van, hosszú nyakára kamerát szereltek. Karjain nagyon sok a különféle szenzor, kifejezetten arra tervezték őket, hogy visszacsatolást adjanak az irányítónak. A legnehezebb feladat pont ez a visszacsatolás volt, ennek azonnalinak kellett lennie a távolság ellenére.
Fotó: esa
A jelet a Nemzetközi Űrállomásról a Föld körül 36 ezer kilométerre keringő műholdhoz küldték, onnan a NASA új-mexikói központjába, onnan a transzatlanti vezetéken keresztül a kísérlet színhelyére, a holland Noordwijkbe. Ekkora távolság után is csak egy másodperc volt a jel késése a parancs kiadása után.
A sikeres kísérlet nagyon sok lehetőséget nyitott meg. A jövőben a hasonló robotokat használhatják például űrszemét eltávolítására, holdbázis építésére, vagy kár a Marson is irányíthatják a robotokat, miközben ők a bolygó körül keringenek.
Kövesse az Indexet Facebookon is!
Követem!