
Science fiction az Anatómiai Intézetben
Kövesse az Indexet Facebookon is!
Követem!További Tudomány cikkek
Páli Jenő agykutató meggyőződése, hogy a XXI. század egyik meghatározó technológiája a neurokibernetika lesz. Tavaly májusban az Anatómiai Intézetben meg is alakult a Neurokibernetikai Laboratórium, ahol többek között mesterséges szinapszis kialakításával, valamint mesterséges érzékszervek és művégtagok építésével foglalkoznak.
Gondolom, mindenki tudja, a mai harci kiborgok kezének szorítása nem azért olyan brutális, hogy stabilan tudják markolni a nehéz lézerpisztolyt, hanem azért mert nincs tapintófelület a kézimplantjukon, így az agy nem kap visszajelzést, és ezért nem is képes szabályozni a mozgást.

Fotók: Huszti István
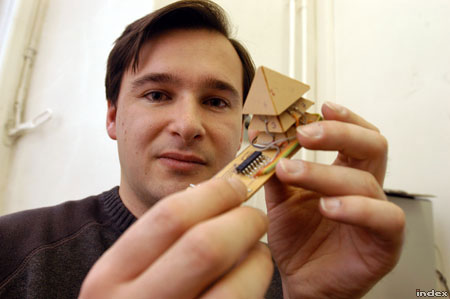

Azt viszont kevesen tudják, hogy Budapesten az Üllői úton az Anatómiai Intézet épületében van egy ajtó, rajta a "Neurokibernetikai laboratórium" felirat, az ajtó mögött pedig egy fiatal kutató, Páli Jenő, aki idegrendszeri elven működő mesterséges tapintófelületet és mesterséges idegsejt-kapcsolatot, szinapszist fejleszt. Hosszabb távon pedig egy olyan intelligens művégtagot, neuroprotézist próbál építeni, ami kétirányú kapcsolatban áll az idegrendszerrel, vagyis érzékelésre és idegrendszeri eredetű mozgatásra egyaránt képes.
Persze még csak az elején jár. Egy háromujjas robotkezet szerel fel tapintófelülettel. A kutató spin off vállalkozása erre nyert 24 millió forintot a Nemzeti Fejlesztési Terv Gazdasági Versenyképesség Operatív Program keretében.
Fotók: Huszti István
De a határ a csillagos ég: "beküldhetünk egy mesterséges tapintó- és fogókészülékkel fölszerelt önjáró műkezet egy meghibásodott atomreaktorba vagy egy égő alagútba, de munkát végezhetünk vele a tenger mélyén vagy egy idegen bolygó felszínén is" - részletezi a pályázatban a lehetséges alkalmazási területeket.
A háromujjú tojásemelgető
A kutató találmányát, az idegrendszeri elven működő tapintófelületet az Európai Szabadalmi Hivatal az oltalmi kör szűkítése nélkül ismerte el. A berendezés olyan elektromos jeleket produkál, amelyek megfeleltethetők azoknak az idegi jeleknek, amelyek bőrünkből származnak, amikor egy tárgy felszíni mintázatát, élét vagy sarkát tapintjuk. Így ha később egy műkezet szerel fel ilyen tapintófelülettel, a készülékből kijövő jelek a mesterséges szinapszison keresztül az agyban tapintási érzetet váltanak ki.
A mesterséges tapintófelület egységek sokaságából áll. A tapintóegység prototípusa egy 5x10 centiméteres nyomtatott áramkörre épített érzékelőrendszer. A kutató munkatársa, Juhász Márton készítette. Az érzékelők három egymásba csúsztatott piramis oldallapjai között helyezkednek el, és mérik a tapintóegységre ható nyomóerő nagyságát, irányát és időtartamát.
Először ezt kell kicsiben megcsinálni. "Azt szeretnék elérni, hogy ugyanekkora felületen ne 1, hanem 128 legyen. Ez már megközelíti az emberi bőr érzékenységét és hasonlít a bőr réteges és redőzött, barázdált szerkezetére" - magyarázza a kutató.
Az egységekből 3 tapintófelületet készítenek, és felszerelik egy robotkéz 2 mutató- egy harmadik, szembehelyezhető ujjára. Majd ezzel az érző visszacsatolással ellátott, számítógépről vezérelt robotkézzel megfognak és mozgatnak különböző súlyú tárgyakat.
"Fel akarunk emelni egy tojást úgy, hogy ne törjön össze, de ne is csússzon ki az ujjak közül. És ugyanígy egy vasgolyót" - magyarázza Páli Jenő. - Mi is úgy tapintunk, hogy amikor érezzük, a tárgy csúszik ki az ujjaink közül, fokozzuk a nyomóerőt. Ha a robotujjak közül csúszik ki a tárgy, akkor a tapintófelületen elbillennek a piramisok. Ezért addig kell fokozni a nyomóerőt, amíg vissza nem állnak az eredeti helyzetbe. Amikor egyik piramis sem mozdul el a többihez képest, akkor vagyunk az ideális nyomóerőnél."
A kézszimulátor
A kutató hosszabb távon teljes műkezet kíván építeni. Ehhez először el kell készíteni az emberi kéz biomechanikai modelljét. Egy olyan robotkezet, mely képes szimulálni az emberi kéz egymástól izületekkel elválasztott részeinek mozgását. Megnéznek és elemeznek hozzá vagy ezer röntgenképet az Országos Baleseti és Sürgősségi Intézet Tudományos és Kísérleti Osztályán, majd az így kapott adatokra rakják rá a valódi emberi kezekből, kézpreparátumokból származó adatokat, például az izületi szalagokról, az inakat alkotó kollagén rostok számáról, az inak tapadási mintázatáról, az izmokról és minden másról.
Az anatómiai működést modellező műkéz kézsebészeknek nyújthat segítséget kézműtétek tervezésénél. Ha pedig az izületi felszínekbe szereljük a tapintóegységeket, akkor lehetővé válik az izületi mozgások pontos szabályozása, valamint a műkézzel megfogott tárgyak alakjának és méretének érzékelése.
Mesterséges szinapszis
De a műkezet még össze kell kapcsolni az idegrendszerrel. Ami eléggé bonyolult ahhoz, hogy elsőre szóban ne is lehessen világosan elmondani. Ezért a kutatótól, akinek a mesterséges szinapszisra is szabadalma van, ezt a részt megrendeltem írásban is. Képet viszont nem sikerült szerezni róla.
"A mesterséges szinapszis, mely rádiójelekkel kommunikál majd a művégtaggal, egy olyan felület, amelyhez a sérült idegekből kinövő idegrostok stabilan és tartósan tudnak kapcsolódni. Az idegregenerációnál azonban nem lehet előre megmondani, hogy a sérült idegvégből mennyi idegrost fog kinőni, és pontosan hova fognak nőni. Olyan megoldást kell találni, amely akkor is működőképes, ha a sérült idegrostoknak csupán a tíz százaléka regenerálódik. A térbeli elrendeződés problémáját egyfajta virtuális valóság kialakításával oldhatjuk meg a mesterséges szinapszisban. A mesterséges szinapszist sematikusan olyan mátrixként kell elképzelni, amelyet 10-15 ezer apró cella alkot, és ezekkel a cellákkal a regenerálódó idegrostok 'valamilyen módon' kapcsolatba tudnak lépni. A cellákba véletlenszerűen benövő idegrostokat egyenként azonosítjuk, "felcímkézzük", hogy ingerlésük milyen érzetet vált ki az agyban. E térképezést követően már tudjuk, melyik idegrostokat kell ahhoz ingerelni, hogy a műkézzel megfogott tárgy által a mesterséges bőrben kiváltott ingerületek olyan érzetet keltsenek az agyban, mintha saját kezünkkel fogtuk volna meg."
Elismerem, nem könnyű olvasmány. De innentől már sétagalopp az út a művégtag akaratlagos mozgatásáig.
A mozgató idegrostokon téridőbeli mintázatokban terjedő mozgásprogramokat ki kell olvasni a mesterséges szinapszisban. A Semmelweis Egyetem Testnevelési és Sporttudományi Karán működő háromdimenziós mozgáselemző és mozgástervező rendszerrel ezután meg lehet tervezni a művégtag mozgását, hogy olyan pályát írjon le, amire a beteg gondol. A következő mozgást pedig a kéz tapintófelületén keletkező és az agyba visszajutó jelsorozat fogja meghatározni.
Kövesse az Indexet Facebookon is!
Követem!