
Elkezdtek látni a gépek
Kövesse az Indexet Facebookon is!
Követem!További Tech cikkek
Totyogó kisgyerekek képesek átmenni a zsúfolt szobán, rátalálni a kiválasztott tárgyra. A gépeket komoly próbára tevő triviális eseménysor a mesterségesintelligencia-kutatás izgalmas kihívása. Az emberi agy látással összefüggő funkcióit kell imitálni hozzá.
Az európai uniós Decisions in Motion-konzorcium három éve foglalkozik a témával, kutatásaiktól nemcsak eredményesebb robotnavigációt várnak, hanem azt is, hogy rendszerük segítse a gyengén látókat és a vakokat.
Eredményesen járkál
A mozgások számítógépes elemzése távolról sem egyértelmű – valójában rendkívül nehéz. Vizuális adatok feldolgozása, tárgyak detektálása, a tárgyak és a gép saját mozgásának megkülönböztetése igen komoly számításokat igénylő, komplex feladatok. A problémakör komplexitásából fakadóan a konzorciumban különböző szakterületek képviselői dolgoznak együtt. Ideg- és kognitívtudományok specialistái fejlett emlősök, főemlősök és az ember látórendszerének működését tanulmányozták, informatikusok és robotikusok az ő meglátásaik alapján hozták létre a rendszerhez nélkülözhetetlen neurális hálózatokat, illetve a „kézzelfogható termék" mobil robotokat.
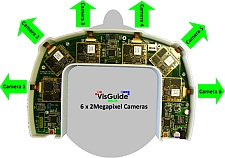
A projekt itt tart, jelenleg látáskárosult személyek könnyebb mozgását támogató rendszeren, virtuálisvalóság-kivitelezésekből ismert, de azoknál bizalomgerjesztőbb sisakokra (head-mounted display, HMD), szemüvegekre emlékeztető hordozható eszközöket fejlesztenek. (Egyik ilyen a kereskedelmi forgalmazásra szánt VisGuide).
Az interdiszciplináris megközelítés sikeresnek bizonyult. A Decisions in Motion égisze alatt létrehozott robot eredményesen jár-kel tárgyakkal teli, rendetlen szobában, mozgásában hozott döntéseit az határozza meg, hogy mit lát. A szemfunkciót „iker" videókamerák töltik be.
„Az eddigi algoritmusok többnyire lassúak, döntéseik nem elég megbízhatók ahhoz, hogy hasznosítani lehessen őket" – nyilatkozta a kezdeményezést koordináló Mark Greenlee. – „A mi megközelítésünk lehetővé tette a munkát menet közben elvégző, az összes döntést másodperc törtrésze alatt meghozó – hagyományos hardveren futó – algoritmusok készítését."
Előre is jelez
A kutatók kiterjedt technikai arzenállal vizsgálták az agy vizuálisadat-feldolgozását, különös tekintettel a helyváltoztatással kapcsolatos információkra: a látórendszer környezetérzékelési módszerét, tárgyak detektálását, mozgások felismerését és megkülönböztetését, célirányos tervezésüket és kivitelezésüket.
Egyrészt mozgásjelekre tüzeléssel reagáló neuronok, neuroncsoportok tevékenységét rögzítették. Másrészt funkcionális mágneses rezonancia képalkotással (MRI) másodpercről másodpercre követték nyomon a különböző agyterületek közötti interakciókat, miközben az adott személy vizuális feladatokat kivitelezett. Harmadrészt neuropszichológiai tanulmányokat végeztek képi-adatfeldolgozási problémákkal küszködő emberekkel.
Egyik legérdekesebb felfedezésük az volt, hogy a főemlősök agya nemcsak észrevesz és nyomon követ mozgó tárgyakat, hanem előre is jelzi, hova mennek. Ha egy objektum feltűnik, a mozgásiránnyal kapcsolatos aktivitáshullámok generálódnak az agyban: az elsődleges vizuális kortex idegsejtjeihez visszacsatolási jelzések érkeznek a kortex magasabb szintű területei felől. Ezek a jelzések „érzékeltetik", hogy mi fog történni.
Pillanatképek
Greenlee érdekes párhuzamot von: egy-egy neuron úgy látja a világot, mintha kémlelőlyukba néznének. Az ottani pirinyó pillanatfelvételek sokaságából csak magas szintű feldolgozással állítható elő koherens kép. A mozgásérzékelésben és feldolgozásban, a természetesen a képalkotásban, viszont nagyon fontos szerep jut az erős előrejelző visszacsatolásnak: ez a jelenség magyarázza és oldja meg az elsődleges vizuális kortex „kémlelőlyukba tekintő" neuronjainak problémáját.
A számítástudományi szakemberek és a robotikusok munkáját az emberi agy mozgáskezelésének mélyebb ismerete alapozta meg. Könnyen beszerezhető hardvert használva építettek ki egy háromszintű neurális hálózatot. A szintek az agy elsődleges, közép- és magas szintű vizuális alrendszereit utánozzák – az információáramlásnak a robot agyában történő irányítása a fejlett és főemlős, valamint az emberi agy különböző területei közti adatmozgások másolatára tett kísérlet.

„Alapvetően egy neurális hálóról van szó, biológiai tulajdonságokkal" – magyarázza Greenlee. – „A kapcsolódásokat a pszichológiai vizsgálatok során kimutatott számok határozzák meg."
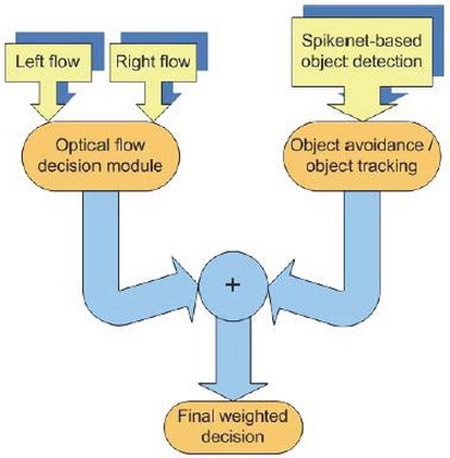
A gépagy irányítja a valós időben mozgatható fejjel és szemekkel felszerelt kerekes robotplatform viselkedését: felgyorsulását, lelassulását, jobbra vagy balra történő helyváltoztatását. Eldönti, merre forduljon a fej, nézzenek a szemek. Azonosítja az objektumokat, megállapítja, hogy önállóan mozognak, vagy sem.
Játékmacival tesztelték először, azt kellett megtalálnia. Úgy viselkedett, mint egy élő személy: gyorsított, ha a tárgyak biztonságos távolságra voltak, lassított, amikor az elkerülendő akadályok közelébe ért.
Greenlee meglepetten konstatálta: ez a viselkedésforma az algoritmusból fejlődött ki. Nem programozták a robotba, hogy így tegyen.

Kövesse az Indexet Facebookon is!
Követem!