
Knight Rider már a kanyarban van
Kövesse az Indexet Facebookon is!
Követem!További Hardver cikkek
Húsz éven belül megérkezhetnek az önműködő autók. A nehézségek nagy részén már túl vagyunk, a többi már csak algoritmus meg számolási kapacitás kérdése.
Néhány mérnökhallgatónak hála a vakok is ki tudták próbálni a vezetés élményét: a Virginia Tech diákjai olyan járművet fejlesztettek, aminek az irányításához nincs szükség látásra. 2004-ben kezdtek dolgozni a projekten, de azóta több intézmény is előállt hasolnó jármű tervével.
Ráznak, ha kell
A vakbarát autók lézeres érzékelőkkel mérik fel maguk előtt a terepet, hangirányítással működnek, és egyéb szenzorok segítik a vakok közlekedését. Az első biztonságos jármű júliusra készült el, amit a Nemzeti Vakszövetség vezetője, Wasley Majerus már ki is próbálhatott. „Eleinte nagyon ideges voltam, de miután megértettem, hogyan működik, egészen felszabadultam” – mondta a 28 éves férfi.
Az iskola robotikában jártas mérnökprofesszora, Dennis Hong nyolc diákjával együtt készítette el a járművet. A rendszert a pilóta nélküli autók ihlették, de Hongék kocsija nemcsak felismeri környezetét, hanem le is fordítja az észlelt tereptárgyakat nem vizuális jelekre, hogy a vakok képesek legyenek közlekedni. A vezetőre adott speciális mellény például vibrálni kezd, amikor a sofőrnek lassítania kell, és erősebben ráz, amikor meg kell állni.
A távolságmérő egy lézersugár segítségével tapogatja le környezetét, a zavaró tárgyak járműtől mért távolságát. Ha a sofőr gyorsít, egy hang közli vele, hogy mennyit kell tekernie a kormányon a sikeres manőverhez.
Mindenkinek hasznos
Hong szerint bár a projekt eredeti célja az volt, hogy a vakoknak segítsenek, az eredmények mindenkinek a hasznára lehetnek majd. „Sokan kérdezik tőlem, hogy miért kísérletezünk ilyen rendszerrel, amikor a vakok más módon is tudnak közlekedni, ők azonban nem veszik figyelembe, hogy rendszerünk a hétköznapi közlekedést is forradalmasíthatja” – mondta a szakember, aki szerint az egészséges vezetők is könnyebben kerülik majd el a baleseteket, koccanásokat a biztonsági berendezésekkel.
A vakok hálásak a járműért, mert az nem egyszerűen elszállítja őket a megadott címre, inkább segít nekik önállóan közlekedni. A nagy többség viszont inkább olyan autót látna szívesen, ami hazaszállítja utasát, ha az berúg, lelőtték vagy egyszerűen nincs kedve vezetni. A többség Knight Ridert akar, és nemsokára meg is kapja.

Az autó figyeli a sofőrt
Jelenleg több olyan kutatás folyik, ami automata járműveket ígér a vezetőknek. A korai példányok már meg is érkeztek, megvásárolhatók. Számos autó kínál sávelhagyásra figyelmeztető berendezést, ami hasonló elven működik, mint Hongék szerkezete: finoman megrázza az ülést, ha váratlan sávváltás történik. Az Opel Insignia felismeri a sebességhatárra figyelmeztető táblákat és kijelzi azokat a műszerfalon. Az új E-osztályos Mercedes figyeli a sofőrt: ha az a szokásostól eltérő stílusban vezet, amit nem indokolnak a közlekedési feltételek, kávézni küldi. Az autó vészhelyzetben magától lefékez, tempomatja képes tartani a távolságot a többi autótól, és már tényleg csak azért nem magától vezet haza, mert azt egy korábbi európai rendelet tiltja.
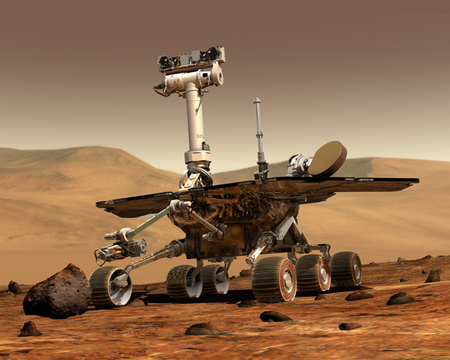
Kérdés, hogy meddig, ugyanis rövidesen számos olyan kutatás ér révbe, aminek a célja az ember teljes száműzése a kormány mögül. Az első két ilyen kísérleti jármű már évek óta közlekedik, igaz nem a Földön, hanem a Marson. Mivel a houstoni irányítóközpontból nehezen lehetne megítélni a szomszéd bolygón uralkodó terepviszonyokat, és a rádiójelek is közel húsz perc alatt teszik meg oda-vissza az utat, a Spirit és Opportunity marsjárók saját magukat irányítják, bár nem valami hatékonyan. Mivel szinte folyamatosan ellenőrzik környezetüket, processzoruk sebessége meg egy gyengébb 486-oséval vetekszik, naponta legfeljebb 8,5 métert, másodpercenként fél centimétert tesznek csak meg.
A Földön ez a tempó elfogadhatatlan lenne, viszont sokkal jobb rendszereink vannak a környezet feltérképezésére. Egy erősebb mai processzor feldolgozási sebessége kétezerszerese a Mars-járó csipjének, viszont földi körülmények közt sokkal több változóval is kell számolni. Például gyalogosokkal.
Kétezer kilométer sofőr nélkül
Az Európai Unió a nyolcvanas években indította el az EUREKA-projektet, ami a mai napig a legnagyobb, vezető nélküli autó fejlesztésére indított program. Nyolc év alatt közel egymilliárd eurót költöttek el a kísérleti járművekre. A fejlesztéseknek meg is lett az eredményük, a kilencvenes évek közepére képesek voltak olyan autót gyártani, amelyik többé-kevésbé magát irányította.
A Mercedes 500 SEL-be épített VaMP ezer kilométert tett meg a Párizs környéki autópályákon úgy, hogy lassított vagy előzött, ha kellett, utazósebessége nem ritkán elérte a 130 km/h-t. A legnagyobb problémát megint csak a gyenge számítási teljesítmény jelentette, ami óriási feladat elé állította a programozókat, akiknek végül sikerült egy többé-kevésbé gyorsan reagáló rendszert építeniük.
Egy évvel a VaMP után a Mercedes bemutatott egy fejlettebb modellt, ami már kétezer kilométert tett meg szinte emberi beavatkozás nélkül Koppenhága és München között, a szakaszon az S-osztályú jármű elérte a 180-as sebességet is.
Szabályos városi önműködés
Bár az EUREKA-ból nem született konkrét autó, a sávelhagyó automatikával szerelt járművek a mai napig profitálnak a kutatási eredményekből. Ahogy az amerikai DARPA-futam résztvevői is, akik hagyományos autókat alakítanak át robotkocsikká. Bár az első évben a futam meglehetősen szánalmas véget ért, amikor a legsikeresebb jármű is csak 12 kilométert teljesített a 240-ből, nem volt öncélú a show: a kocsik egyre jobbak lettek.
A következő évben már szinte mindegyik DARPA-járgány befejezte a futamot, míg 2007-ben már városi részt is beiktattak a versenybe: a győztes jármű 4 óra 10 perc alatt tette meg a közel száz kilométeres távot, ami 23 kilométeres óránkénti átlagsebességet jelent – ez körülbelül ezerszerese a Mars roverének. A Tartan lézeres érzékelőivel, kameráival és GPS-vevőjével helyezte el magát a térben és határozta meg helyzetét a többi járműhöz képest, ráadásul még arra is maradt számítási kapacitás, hogy a közlekedési szabályokat betartsa.
Az eredmények ígéretesek: Chris Urmson, a jármű egyik megalkotója a Wired riportjában elmondta, hogy körülbelül tíz év kell még a technológia tökéletesítésére, utána kezdődhet a komolyabb tesztidőszak, majd az engedélyeztetés, a kétezerhúszas évek végére azonban már könnyen elképzelhető, hogy automata járműveket tudunk venni az autókereskedőknél.
Addig azonban még több problémát meg kell oldani. Egyrészt a számítógépnek fel kell fognia az állandóan változó környezet minden elemét. A járműnek el kell tudnia magát helyezni a térben és azt is tudnia kell, hova tart. Ügyesen kell lavíroznia forgalomban, valamint kezelnie a mechanikus alkatrészeket.
A fenti négy kérdésből két és fél megoldott: a navigáció és az autó mechanikus szerkezeteinek irányítása már nem jelent problémát. A szenzoroknak hála a robotok már egyre jobban felismerik a változó környezetet, várhatóan rövidesen ezzel a kérdéssel sem kell többet foglalkozni. Az igazi problémát a hatékony és biztonságos közlekedés jelenti, hogy a robot el tudja kerülni a veszélyes helyzeteket, hogy felismerje, melyik szituációban melyik a legjobb döntés, és gyorsan tudjon reagálni. Szakértők szerint még jó pár évig eltart a megfelelő algoritmusok megalkotása, valamint a megfelelő számolási teljesítményre is várni kell. De már biztosan nem sokáig.
Kövesse az Indexet Facebookon is!
Követem!
