
Óbudán épül az autóipar Nokiája

Kövesse az Indexet Facebookon is!
Követem!További Tech cikkek
-
 Olyat hibát produkál a Windows, hogy garantáltan mindenki kiugrik a székéből
Olyat hibát produkál a Windows, hogy garantáltan mindenki kiugrik a székéből - Könnyen megeshet, hogy a Google kénytelen lesz eladni a Chrome-ot
- A Huawei hivatalosan is bejelentette, előrendelhető a Mate 70
- Lesöpörheti Elon Musk X-ét a Bluesky, már a Google is relevánsabbnak találja
- Ezek a leggyakrabban használt jelszavak – érdemes változtatni, ha ön is használja valamelyiket
Az önjáró autók forradalma szó szerint itt van a nyakunkon: a jövőben Budapesten rakják össze az autók szemét, némi mesterséges intelligenciával megspékelve. A cél az, hogy a robotsofőr minden eseményt felismerjen haladás közben. A rendszert kifejlesztő Adasworks bődületes tempóban fejlődik, és szabványok kialakításával mutatja az utat az iparágnak.
2016. május 7. délután 3:40 meghatározó pillanat volt a világ autógyártóinak életében. A Floridát észak–déli irányban átszelő 27-es úton egy robotsofőr által vezetett Tesla Model S belerohant az úton keresztben áthaladó kamionba. A pótkocsi letépte az Tesla tetejét, és az alatta átrobogó, minden irányítást elvesztő autót – pár száz méterrel odébb – egy villanypózna állította meg.
A sofőr, Joshua Brown, már nem mondhatja el nekünk, hogy miért nem vette észre a hatalmas kamiont.
Azt viszont pontosan tudni lehet, hogy a Tesla robotsofőrje miben hibázott. Egyetlen kamerája a szikrázó napsütésben nem tudta megkülönböztetni a pótkocsi fehér rakterét az égtől, a radar pedig út fölötti táblának vélte a hatalmas felületet.

Fotó: Handout / Reuters
A balesettől teljesen felbolydult az autóipar, de erre még rátett egy lapáttal az Uber bejelentése, hogy teljesen önjáró autókat akar, amelyekben egyáltalán nincs szükség sofőrre. Az autógyártók rádöbbentek, hogy vagy elképesztően felpörgetik a fejlesztéseiket, vagy felvásárolják a robotsofőrt készítő szoftvercégeket. Be vannak tojva, mert a legnagyobb versenyelőnyük most a belső égésű motorjaikban van, és ezeket néhány országban – például a hatalmas olajtartalékkal rendelkező Norvégiában – már elkezdték betiltani.
Pár évtizeden belül egészen biztosan mindenhol csak elektromos autókat engednek az utakra. A villanyautók pedig olyan egyszerű felépítésűek, hogy a gyártásba bárki be tud majd szállni, megszűnik a hardver által biztosított előny. Az érték a szoftverekben lesz, és a nagy autómárkák ebben nagyon rosszul állnak.
Most van a Nokia-pillanat az önjáró autók történetében
– mondta Kishonti László, az Adasworks alapítója és vezetője. A cég célja nem kisebb, mint hogy meghatározó szereplő legyen ebben a történetben. A vállalat egy mesterséges intelligenciával támogatott számítógépes látás fejlesztésén dolgozik,
ez lesz a robotsofőrök szeme.
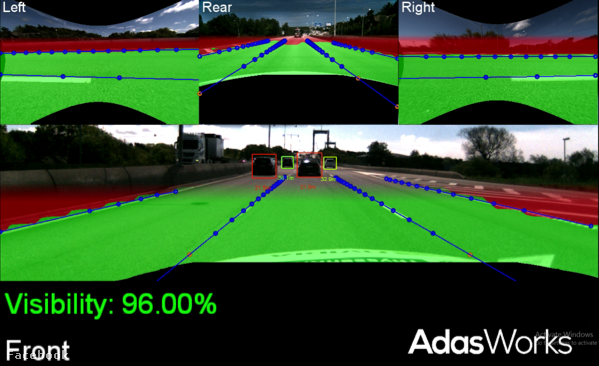
Egyszerű és olcsó kamerák képe alapján mérik fel a terepet, és a fedélzeti számítógép így hoz döntéseket arról, hogy az autónk merre és milyen sebességgel tud biztonságosan haladni.

Fotó: AdasWorks / Facebook
Az Adasworks kezdeményezett egy szabványt, aminek a kidolgozását nemrég elfogadta egy iparági testület. Ebben az áll, hogy miként lehet mesterséges intelligenciát futtatni kis energiafelhasználású rendszereken. A szabványnak hála olyan célhardverek jöhetnek létre, amelyekkel a rendszerük 500 W körüli fogyasztása 10 W alá vihető le.
Mindent látni kell
A mai közlekedésben minden az emberi látásra épül, és ha nem akarjuk rengeteg milliárd dollárból átalakítani a világ úthálózatát, ez így is marad. Ezért volt fontos az Adasworksnek, hogy a rendszerük fő érzékelői egyszerű kamerák legyenek. Egy személyautóban hat kamerát kell elhelyezni a biztonságos közlekedéshez. Kettő néz előre, mégpedig úgy, hogy a rögzített képek átfedjék egymást, mert így akkor sem lehet gond, ha az egyik kamera valamilyen oknál fogva működésképtelenné válik. Sötétben infrás érzékelőkkel dolgoznak, mint az éjjellátó biztonsági kamerák.
Kishonti azt is elmagyarázta, hogy mi a gond a többi érzékelővel. A radar már a Tesla balesetében is megmutatta, hogy mennyire megbízhatatlan, és a felbontása a százezred része annak, amit egy kamera lát. Az Adasworks rendszere a radart csak biztonsági tartaléknak használja, olyan extrém esetekben, amikor emberi sofőr se tudná vezetni az autót, mert nem lát semerre (például beterítik trágyával az autót.) Ilyenkor is meg kell oldani, hogy biztonságosan félre tudjon húzódni az autó, és addig se ütközzön neki semminek.

Fotó: Brooks Kraft / Getty Images Hungary
Szóba jöhetne még a lézeres radar is, a lidar, amit a Google is használ az autóiban. Ennek azonban bődületes ára van, egy nemrég bemutatott olcsó változata nagyjából kétmillió forintba kerül, és elég rövid életű az eszköz, túl gyakran kéne cserélni vagy javítani. A lidar által készített 3D térkép ráadásul elég nagy adatforgalmat generál: kilométerenként gigabájtnyi adatot kell rendszeresen az autóra juttatni. A lidar egyetlen komoly előnye abban van, hogy minden pixelnek a távolsága is ismert. A felbontás viszont még itt is alacsony, ezredrésze annak, amit egy olcsó kamera lát.
Játékból valóság
Mutatunk néhány videót, hogy érthetővé váljon mesterséges intelligenciával támogatott gépi látás. Az első videón az látható, hogy a kamera képe alapján miként azonosítják a különféle objektumokat, amelyeket eltérő színnel jelölnek.
Észrevette a kék bőröndöt? Ha nem, akkor nézze meg újra a videót, ezúttal figyelmesen. Látni fogja, hogy a kamerás rendszer profin meg tudja különböztetni az embert, és az általa cígölt gurulós poggyászt.
A következő videón az látható, hogy az objektumokat, vagyis a kamera látóterében mozgó embereket akkor is nyomon követi a rendszer, ha a kamera felől nézve átfedik egymást, miközben elhaladnak egymás mellett.
Az Adasworks rendszere sokféle adatra támaszkodik, amikor egy biztonságos útvonalat keres az autónak. Valós időben kell frissülnie a fedélzeti térképnek, és az utakon előforduló objektumok – biciklik, emberek, nagy fehér teherautók – felismerésén túl olyan helyi jellegzetességekkel is számolnak, hogy például Olaszországban rengetegen robogóznak.
Az autó fizikai tulajdonságait is az alapján veszik figyelembe, hogy milyen márkáról és típusról van szó. Egy családi egyterűben is lehet erős motor, de teljesen más stílusban közlekednek velük, mint a kétüléses túraautókkal.
Fotó: AdasWorks / Facebook
A mesterséges intelligencia egyik legfontosabb szerepe abban van, hogy megadja a felismert objektumok mozgásának valószínűségét.
Egy álldogáló ember valószínűleg el fog indulni valamerre, míg aki összevissza imbolyog, az feltehetően részeg.
A rendszer ilyen részletek alapján próbálja kitalálni, hogy melyik objektum hol fog felbukkanni. Nagyon kicsit az esélye, hogy egy egyenesen álló ember egyszer csak az autó elé feküdjön, viszont a részegekkel jobb vigyázni.
A robotsofőrök bevezetése előtt természetesen rengeteg tesztelést kell elvégezni. Az Adasworks egyik versenytársa például hatszáz embert foglalkoztat Srí Lankán, akik manuálisan dolgozzák fel a mérőkocsik által utcán felvett képeket. Ez viszont rengeteg pénzt és munkát igényel, úgyhogy Kishonti László inkább megkérte a csapatát, hogy
hekkeljenek szét egy videojátékot.
Meg is tették, ahogy a lenti videón is látható, és kiderült, hogy ezzel a módszerrel ezerszer gyorsabban tudnak adatokat kinyerni. A mesterséges intelligenciának ugyanis azt kell megtanulnia többek közt, hogy a különböző autótípusok hogyan néznek ki a legkülönfélébb irányokból nézve – itt megint visszautalnánk a Tesla balesetére, ahol ugye pont ebből volt a baj, hogy oldalról nem ismerte fel a kamiont.
A szétberhelt autós játékot nem lehetett volna üzleti célra használni, ezért az Adasworks csinált egy sajátot, amiben gyalogos és biciklista is van:
Gyorsítósávban haladnak
Kishonti csapata gyorsan növekszik. Úgy egy évvel ezelőtt tizenöten dolgoztak náluk, most több mint százan, és a napokban nyitották meg az irodájukat a Szilícium-völgyben. A budapesti csapat is hamarosan új irodába költözik, ahol akár kétszázan is elférnek. A munkatársakat részvényekkel igyekeznek magukhoz vonzani és megtartani – szétosztották közöttük a cég 10 százalékát. (Az egyik mérnököt, Oláh Károlyt a szeptemberi Fenntarthatósági Napon meg lehet hallgatni.)
Eddig összesen 10,5 millió eurónyi tőkét vontak be, és a befektetőik közt van egy autóipari nagyágyú kockázatitőke-részlege, a Robert Bosch Venture Capital is. Már készülnek a következő befektetési körre, erről Kishonti csak annyit árult el, hogy „nagyobb összegű lesz”.
Az Adasworks fő célja, hogy három fontos földrészen, Európában, Amerikában és Ázsiában is legyenek önvezető autók, és ezt olyan rendszerrel tudják támogatni, ami nemcsak jól működik, hanem még skálázható is, minden autóba bekerülhet. Hogy mikor kerülnek az utakra? Kishonti László szerint az a termék, amely még nem irányít, csak figyelmeztet és fékez, leghamarabb 2018-ban jelenhet meg, az autót irányító verzió pedig 2020-2022 környékén.
Kövesse az Indexet Facebookon is!
Követem!