
Gondolta volna, hogy virtuális valóságból is van kézműves változat?
Kövesse az Indexet Facebookon is!
Követem!További Tech cikkek
-
 Olyat hibát produkál a Windows, hogy garantáltan mindenki kiugrik a székéből
Olyat hibát produkál a Windows, hogy garantáltan mindenki kiugrik a székéből - Könnyen megeshet, hogy a Google kénytelen lesz eladni a Chrome-ot
- A Huawei hivatalosan is bejelentette, előrendelhető a Mate 70
- Lesöpörheti Elon Musk X-ét a Bluesky, már a Google is relevánsabbnak találja
- Ezek a leggyakrabban használt jelszavak – érdemes változtatni, ha ön is használja valamelyiket
A virtuális valóságban nemcsak lövöldözni lehet, hanem mondjuk fogaskerék-hajtóművet szerelni is, és mint kiderült, ez is ugyanúgy be tud húzni, mint egy videojáték. A miskolci Bay Zoltán kutatóintézetben fejlesztettek egy virtuális tréningplatformot erőműveknek, amellyel egyszerre lehet térbeli és finommotoros mozgásokat gyakorolni, így ideális lehet arra, hogy veszélyes munkafolyamatokat gyakoroltassanak vele olcsóbban és biztonságosabban. Kipróbáltuk a demót, van még hova fejlődnie, de ígéretes. A gyakorlati alkalmazás még odébb van, de ez elsősorban a hardveren múlik, nem a magyar fejlesztésen.
Bár a virtuális valóságról általában a videojátékok vagy a pornó jut az emberek eszébe, ennél jóval szélesebb körben próbálkoznak a hasznosításával. Arról már korábban írtunk, hogy az egészségügyben hogyan jut egyre nagyobb szerephez, például az orvosképzés tréningeszközeként. Ezúttal a miskolci Bay Zoltán kutatóintézetben jártunk, hogy megnézzük az ott fejlesztett ipari VR-szimuláció demóját.
Magával a VR-rel ugyan már korábban is foglalkoztak, és a konkrét projekt négy éve indult, Beleznai Róbert vezető kutató szerint egy korábbi Index-cikk adta nekik az ötletet, hogy kipróbálják az Oculus Rift nevű VR-szemüveget, amely ma is a legkörülhájpoltabb eszköz a VR-piacon. Azóta ez a rendszerük központi eleme, ehhez legózták hozzá időközben a többi hardvert.
Virtuális terepmunka
A csapat ipari környezetbe vinné be a virtuális valóságot – vagy fordítva, az ipari valóságot vinnék be virtuális környezetbe: erőművek vagy más kockázatos ipari létesítmények javítási, karbantartási munkáinak az oktatását segítenék a tréningplatformjukkal.

14
Galéria: Virtuális terepmunkaFotó: Bay Zoltán kutatóintézet
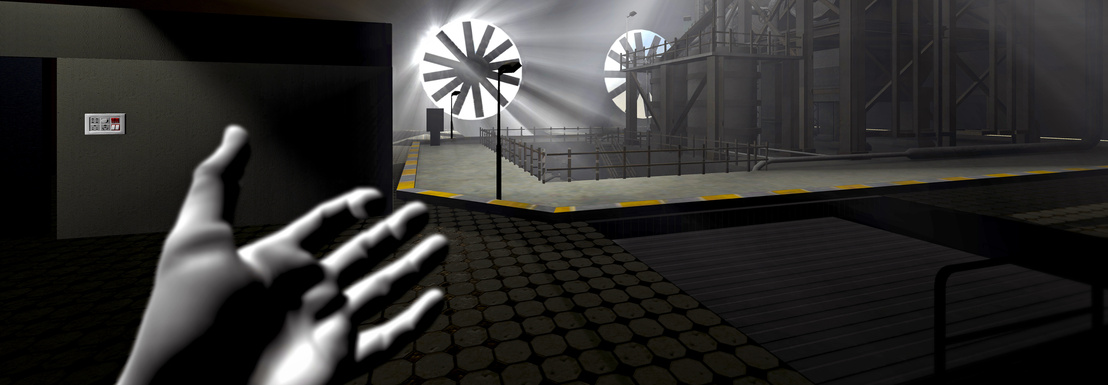
A módszer lényege, hogy számítógép által generált környezetben lehet bejárni a gyárat, megkeresni a szerelésre szoruló berendezéseket, és ott helyben gyakorolni a különböző karbantartási munkákat vagy elsajátítani az ipari eszközök összeszerelését. A tréning során a rendszer modellezi a valóságban előforduló meghibásodásokat, irányítja a felhasználót, értékeli a teljesítményét, elemzi a hibáit.
A virtuális képzésnek több előnye is van:
- Biztonságos körülmények között, de a valós stresszhelyzet szimulálásával lehet gyakorolni kockázatos munkafolyamatokat.
- Olcsóbb is, mint ha le kéne állítani az üzem működését, vagy fizikailag meg kéne építeni egy gyakorlóterepet.
- Könnyen felfrissíthető vagy naprakészen tartható a szaktudás, mert extra költség nélkül megismételhető a program. Ezzel minimalizálható az emberi hibából adódó üzemi balesetek száma.
- Bárhonnan használható, ahol megvannak a szükséges VR-eszközök.
- Nemcsak már létező, de még meg nem épített létesítmények karbantartására is előre fel lehet készülni.
Három elemből áll a rendszer. Az Oculus Rift VR-szemüvege adja a térbeli látványt, ez helyez be a minket körülvevő virtuális térbe, ahol a fejmozgást követő nézőpontból szabadon lehet nézelődni. Ebben a virtuális térben az osztrák fejlesztésű Cyberith Virtualizer segítségével lehet mozogni. Ez olyan, mint egy korláttal kerített, körkörös futópad: a közepén rögzítjük magunkat egy hevederrel, aztán akármilyen irányba futhatunk, foroghatunk, guggolhatunk vagy ugrálhatunk, a szimulációban a virtuális énünk ezt leképezve halad előre. A Leap Motion nevű szenzor pedig követi a finommotoros mozgást, vagyis ennek a feladata minél pontosabban leképezni az apró kézmozdulatokat. Így nincs szükség külön kontrollerre, magával a kezünkkel tudjuk manipulálni a virtuális környezetet.
Bár az Oculus Rift végleges változata még nem jelent meg, önmagában egyik eszköz se újdonság. A különböző VR-eszközök kombinációjával is sok fejlesztő kísérletezik világszerte. Ilyen típusú ipari szimuláció viszont még sehol nem létezik,
a magyar fejlesztésű rendszer nemzetközi szinten is újdonságnak számít.
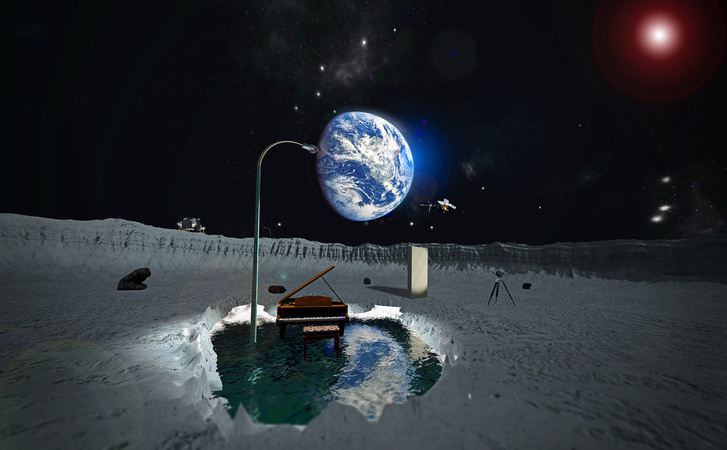
Az egész rendszer alapja, hogy kell egy virtuális környezet, amelyben aztán lehet egyszerre térben mozogni és matatni a műszerekkel. Ez a környezet bármi lehet: én például először egy Holdra telepített zongorával próbálgattam a rendszert. Magához a tréninghez a krátereknél jobban passzol a gyári környezet, ehhez jelenleg fiktív helyszínt használnak, de később le lehet modellezni konkrét erőműveket is, amelyeknek a munkálatait épp gyakoroltatni akarják.
14
Galéria: Virtuális terepmunkaFotó: Bay Zoltán kutatóintézet
A virtuális teret életre is kell kelteni, hogy a fizikai törvényszerűségeknek engedelmeskedő, interaktív térként működhessen. Ehhez Miskolcon a Unity játékmotort használják, amellyel például az Angry Birds 2 vagy a Firewatch is készült. Dobos Gergely szerint, aki magát a platformot fejlesztette Tímár László segítségével, azért a Unityt választották, mert ezt találták a legrugalmasabb megoldásnak, ezt a motort tudták leginkább az igényeikhez szabni.
Kézműves VR
Ideális esetben az eszközöket csak össze kéne szedni, és szépen kiegészítenék egymást, de valójában jóval kevésbé gördülékenyen működnek a mai VR-kütyük, mint amit a reklámvideók alapján gondolhatnánk. Egyrészt még mindig sok a pontatlanság az egyes eszközöknél, másrészt a különböző gyártók eszközeinek az együttműködése se magától értetődő mutatvány.
Ezért a miskolci intézet platformja esetében saját szoftveres buherálással kell áthidalni a hardveres hiányosságokat és épkézláb rendszerré összehangolni az elemeket. Ez a gyakorlatban olyan algoritmusokat jelent, amelyek a szenzorok hiányos vagy pontatlan adatai alapján felismernek bizonyos mozgási sémákat, és következtetnek, hogy mit is próbálunk csinálni éppen.

Fotó: Barakonyi Szabolcs
Ebben a legnagyobb kihívás eltalálni, hogy pont annyit segítsenek, hogy kellően megkönnyítsék a felhasználó dolgát, de még a fizikai valósághoz elég közel álljon a szimuláció működése, és ne legyen túl könnyű a feladat. Vagyis
meg kell találni a felhasználói élmény és a funkcionalitás közötti egyensúlyt.
A szerelési feladatoknál például azt kell kiszámolni, hogy mennyi az ideális rásegítés, hogy az alkatrészeket valóban nekünk kelljen a helyükre rakni, és ne fél méterről pattanjanak oda, de bizonyos hibahatáron belül azért már becsusszanjon az a csavar a furatba akkor is, ha a virtuális kezünkkel nem nanométeres pontossággal dolgozunk.
Az összehangolás kihívásaira pedig jó példa a Leap Motion összebékítése az Oculus Rifttel. Ahhoz, hogy előbbit szabad kézzel lehessen irányítani, kamerákkal figyeli a kézmozgásokat, ez viszont azzal jár, hogy elég korlátozott a látótere. Ahhoz, hogy a térben mozogva is használható legyen, a miskolciak ráerősítették az Oculus Riftre, hogy a szenzorai mindenhol érzékeljék a kézmozgást, ahová nézünk vele. De mivel alapvetően statikus, asztali használatra tervezték, a fejmozgással torzulnak a kézre vonatkozó adatok. Ezért jobb híján házilag kellett úgy kiigazítani a rendszert, hogy a fej- és kézmozgás összevetéséből kiszámolja a kéz valódi mozgási értékét. (Ennek a megoldására az utóbbi évben már a két hardvergyártócég is összefogott.)
Jó, ha szép, de fontosabb, hogy működjön
Ha már úgy kóborolhatunk egy erőműben, mint egy videojáték egy pályáján, felmerül a kérdés, mennyire kell grafikailag kidolgozottnak lennie a környezet részleteinek, hiszen azért mégse egy játék fejlesztése a cél. Dobos szerint ugyanakkor egy ipari szimulációban is igaz, hogy minél élethűbb az élmény, annál jobban beszippantja az embert, és végső soron a funkcióját, vagyis a képzést is annál jobban látja el.

Fotó: Barakonyi Szabolcs
A Unityt ugyan nem a grafikus képességeiért, hanem azok ellenére választották, menet közben maga a motor is sokat fejlődött ezen a téren Dobos szerint. A rendszer grafikai képességeit egy tökéletesen kidolgozott, mindenféle textúrákkal és tükröződésekkel teleaggatott lakásbelsőn mutatta be.
A valósághű látvány nyilván sokat dob az élményen, de nekem épp egy végletekig csupaszított alkatrészszerelős demó bizonyította, hogy a grafikánál fontosabb, hogy működjön a fizika: az olyan alapvető dolgok, mint hogy ha gyorsabban mozgunk, gyorsabban haladjon a virtuális énünk is; az ajtó csak akkor nyíljon ki, ha elég ideig nyomjuk, viszont ha meglökjük, csapódjon ki rendesen (és minél lendületesebben lökjük, annál erősebben); ha félremegy a csavar, akadjon is meg a menetben, stb. Ha mindez valószerűen működik, ugyanúgy be tud húzni az élmény, mint a legkidolgozottabb környezetnél. Sőt, az agyunk nagyrészt képes a tapintás hiányát is áthidalni, ha a látvány elég pontos.
Még nem elég jók a kütyük
A három hardverből egyébként a Cyberith járókája volt a legszokatlanabb, olyan pózban lehetett rajta helyben járással előre haladni, mintha valami nehéz dolgot kellene folyamatosan magunk előtt tolnunk. Az is paradox érzés, hogy a fizikai valóságban egy korlát tart a helyünkön, hogy a virtuálisban szabadon mászkálhassunk – attól bezzeg nem véd meg, hogy lecsússzunk mondjuk egy virtuális holdbuckán. (Kinecttel is próbálkoztak korábban a fejlesztők, de azt túlságosan korlátolt megoldásnak találták.)

Fotó: Barakonyi Szabolcs
Látva, hogy egy könnyed délutáni fogaskerékhajtómű-szerelésbe is majdnem annyira bele lehet feledkezni, mint egy becsületes videojátékba, fel is merült bennem, hogy a tréninget össze lehetne kötni gamifikációval, hogy a versenyeztetés-jutalmazás még érdekesebbé tegye a dolgot. Ilyesmit korábban nem terveztek a fejlesztők, de már gondolkoznak ezen a lehetőségen is.
Most viszont még inkább azzal vannak elfoglalva, hogy a platform alapjait csiszolgassák, hibakeresési fázisban tart a projekt. Az a demóból is látszott, hogy nem működik még minden tökéletesen, a furatba engedett alkatrész még nem pont úgy huppan a helyére, ahogy a gravitáció azt megkövetelné, az ujjak is hajlamosak összecsúszni néha a zongorán, ha a külső fényviszonyok megzavarják a szenzorokat.
A demó viszont ezzel együtt is ígéretes, és a fejlesztők szerint a hardver a szűk keresztmetszet. Hiába a lakossági VR sztárja például az Oculus Rift, valójában még nem elég jó. Az olcsóbb, mobiltelefonok kijelzőjére támaszkodó VR-szemüvegekkel nem is számolnak, de más komolyabb eszközökre, mint a HTC Vive, elképzelhető, hogy adaptálják majd.
Ha a megfelelő hardver adott lesz, és itthon is beszerezhető, Szávai Szabolcs, a platformot fejlesztő Szerkezetintegritás és Gyártástechnológia Osztály vezetője szerint két éven belül élesben is bevethető állapotba tudják hozni a fejlesztésüket. Már beszélnek több ipari szereplővel, elsősorban őket kell meggyőzni, hogy a VR-rel szembeni előítéletek ellenére a platform tényleg elterjedhessen, és az erőművek szakembereinek a képzésében is használni kezdjék.
Kövesse az Indexet Facebookon is!
Követem!

Ne maradjon le semmiről!