
Négyszázezer dollár és csomót köt, mi az?
Kövesse az Indexet Facebookon is!
Követem!További Tech cikkek
-
 Itt az Instagram új frissítése, ezentúl észrevétlenül nézegethetjük mások sztorijait
Itt az Instagram új frissítése, ezentúl észrevétlenül nézegethetjük mások sztorijait - Jelentősen drágulnak a Netflix előfizetői csomagjai
- Újabb országban tilthatják be a közösségi médiát a gyerekek számára
- Töltés közben használta telefonját a 15 éves lány, belehalt a sérüléseibe
- Itt a LEGO hatalmas dobása, ilyet még nem láttunk, elsőre azt sem tudtuk, mi ez
Mei Chennek, az Intel Tudományos és Technikai Központ vezetőjének több tudományos fokozata van, mint az összes köztársasági elnökünknek együttvéve; nem meglepő, hogy ő vezeti az Intel pittsburgh-i kutatóintézetét a Carnegie Mellon Egyetemen (CMU). Joggal számíthatnánk arra, hogy sosem látott, egzotikus híreket kaphatunk tőle a robotika fejlődéstörténetéről, de a Berkeley Egyetemen tartott bemutatóján több szó esik a CMU-n végzett kísérletekről és eredményekről, mint az itteni munkáról. Amivel nincs is baj, elvégre minden szentnek maga felé hajlik a keze. Csak éppen a tavalyi, a CMU-nál tett látogatásunkon a saját szememmel láttam, ahogy HERB, az egekig magasztalt robotinas számára még egy doboz étel megmikrózása is teljesíthetetlen feladatnak bizonyult.
De igazságtalanság lenne azt állítani, hogy a robotika áltudomány. Ez az előadás egyébként sem az Ítélet Napjának dátumát akarja megadni, csak nagy vonalakban felvázolja, hogy mit gondol az Intel a jövőről. Ez nyomokban emlékeztet arra, amit a cég jövőkutatója, Brian David Johnson is mondott egy korábbi interjúnkban: a cél a határok elmosása a felhasználó és a számítógép között. Ez népszerű trend: nem véletlenül ekkora a felhajtás a Google Glass körül, és a wearable computing manapság az IT-ipar egyik leghangzatosabb hívószava. Az Intel is kísérletezik hasonló technológiával: egy rövid rajzfilmben mutatják be, hogy milyen szép lesz az, amikor a karóránk figyelmeztet arra, hogy a teniszpályán felejtettük a pénztárcánkat (persze ehhez kell majd egy teniszpálya is).
Ezek az eszközök persze gyártanak némi adatot. Az Intel becslései szerint 2017-ig egy átlagos felhasználó több ezer gigabájtos adatforgalmat fog bonyolítani. A hozzáférhetőséget a felhő alapú adattárolás biztosíthatja, hogy az adatok mindenhol elérhetők legyenek. Az előadóteremben Edward Snowden szelleme kísért: a holland kolléga amiatt kezd aggódni, hogy a kormányok ezek után bármilyen személyes adatunkhoz hozzáférhetnek. Ez a félelem talán nem alaptalan, de ezt mégsem a robotika szakértőjén kéne számon kérni.
Így gondozd a robotodat
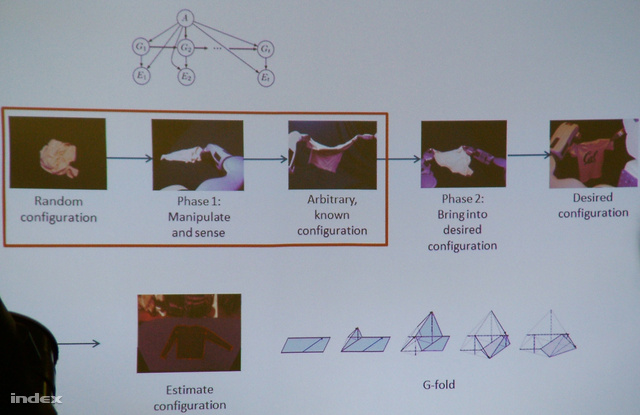
Már csak azért sem, mert Chen ennél érdekesebb dolgokról is mesél – például arról, hogyan taníthatók a robotok. Ez igen bonyolult folyamat: mivel nincs nekik agyuk, kénytelenek az emberét használni, akiknek a robotoktól elvárható viselkedést kell programkóddá formálniuk. A robotok az emberektől is szerezhetnek tapasztalatokat, és a (számukra) demonstratív bemutatókkal a megfelelő módon fejleszthetők, de ehhez nemcsak a célfeladatot kell megismertetni velük, hanem a környezetüket is.

Egy gyártósori robottal ilyen probléma nincsen: megmutatják neki a célobjektumot, itt az X, ide fúrsz, és ezt húsz másodperc múlva megismétled a következő munkadarabbal. Ez csak egy ismétlődő mechanizmus, amihez még annyi mesterséges intelligencia se kell, mint egy zenélő képeslaphoz. Az intelligens robotoknak azonban figyelniük kell a környezetükre is: ez az egyik alapfeltétele annak, hogy hatékonyan végezhessenek el összetettebb feladatokat.Egy embernek például nem esik nehezére felemelni egy objektumot egy több tárgyból álló kupacból, de egy robotnak ezeket a tárgyakat először is el kell különítenie.
Gyors videót láthatunk egy fából készült, középtengelyes játékvasútról, majd megfigyelhetjük, hogy a robot ezt hogy érzékeli: a játék felületen kis pöttyök jelennek meg, külön színekkel jelölve a játék különböző felületeit. A színkódok alapján a robot már megkülönböztetheti az objektum egyes részeit, és azt is megállapíthatja, hogy hajlékony tárgyról van szó. Míg számunkra ez teljesen egyértelmű, addig a robot programozása során ezeket az alapvető tényeket is programkóddá kell alakítani. Chen ezt motion planningnek, mozgástervezésnek nevezi: ennek során a robotok új, másodlagos képességeket szerezhetnek. Ehhez azonban emberi közreműködésre van szükség – a gépek lázadása még várat magára.
A kiválasztottak drága játékszere
A PR2 robot egy zöld terítővel letakart, műtőasztalra emlékeztető pult előtt áll, felemelt karokkal, láthatóan bevetésre készen. „Ki lesz az első páciens?” – viccelődik az orosz kolléga, mire a demonstrátor rávágja: „Mindig azt áldozzuk fel elsőként, aki ezt megkérdezi.”
A robotikai labor középmagas panelekkel elválasztott falakkal elválasztott, nagy terű helyiség. Igazi geeklaboratórium, mintha egy gyár és egy programozói részleg keveréke lenne. Mindent elborítanak a vaskos, kínai és indiai nyelvű szakkönyvek, a felfoghatatlan képletekkel telefirkált papírlapok, a kiivott energiaitalos dobozok, a szanaszét heverő vezetékek és a villódzó Ubuntu-terminálok. Úgy tűnik, robotot nevelni fáradságos munka és igen költséges is.
Azonnal kiderül, hogy a látszat nem csal. Demonstrátorunk szerint az eredetileg házi inasnak tervezett PR2 tokkal-vonóval 400 ezer (igen, négyszázezer) dollárba került. A PR2, amit eredetileg a Jetson-család robotcselédje, Rosie ihletett, igen drága karokkal és roppant érzékeny szenzorokkal dolgozik. Nemcsak a jelfeldolgozó egység bonyolult: a robotkar érzékeli az általa kifejtett nyomást, a manipulált objektumok pozícióját, és számos más tényezőt, ehhez azonban drága alkatrészekre és precíziós szoftverekre van szükség.
A fejlesztők ugyanakkor remélik, hogy a gyártástechnológia idővel olyan szintre fejlődik, hogy az mindenkinek megfizethető legyen; a kitűzött cél a kétezer dolláros, de működő robot kifejlesztése. Ez nem is elképzelhetetlen utópia. A komplex térhatású szenzorok régebben a kísérleti laboratóriumok drága játékszerének számítottak. De ma? A Microsoft játékkonzolhoz csomagolja őket, hogy kétfilléres flashjátékokat futtathassunk velük.
Orvos leszel, nem cseléd
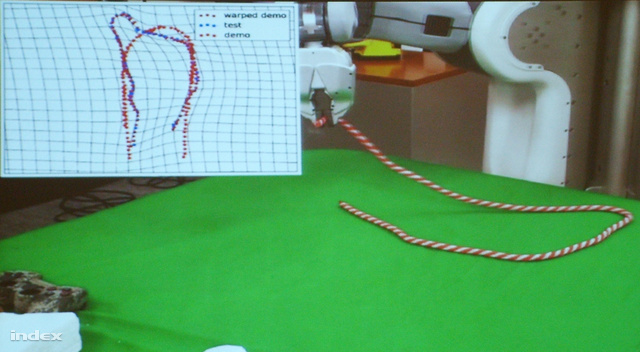
A bemutató is rávilágít, hogy a robotok megnevelése nem csak játék és mese. A csomókötéssel bajlódó PR2 zónákra osztja fel az előtte fekvő területet; a fejlesztők ezt egymást metsző merőleges vonalakkal illusztrálják, amik egy négyzetrácsos hálót adnak ki. A robot ezután elemzi, hogy az előtte heverő kötél ennek a hálónak melyik négyzeteit fedi le, és ez alapján tudja meghatározni a pozícióját az asztalon. A céltárgy bemérése majdnem sikeres. A PR2 némi gondolkodás után leereszti a kezét, elfordítja a csuklóban forgatható kézfejét, tétován rakosgatni kezdi a madzagot, majd felkészül a csomókötésre – és elhibázza. Az egyik kar nem tudta megragadni a kötél végét, így a művelet félbeszakadt.
Másodszorra sikerrel jár, és el vagyok ragadtatva. Elvégre egy csomókötés, amire egy óvodás is megtanítható, a matematika és a programkód nyelvén hihetetlenül bonyolult dolog. Aki ebbe nem gondol bele, joggal gúnyolódhat azon, hogy nahát, egy négyszázezer dolláros robot meg tud kötni egy csomót! És valahol igaza van.
A robot a házimunkával már jobban boldogul. Az eléje tett törülközőt például nemcsak összehajtogatni tudja, de ha utána gyűrődést észlel rajta, még azt is kisimítja. A sebessége viszont őrjítő: ha Tarr Béla filmet rendezne egy csigára vadászó lajhárról, az pont ilyen lenne. Mégsem lehet rá haragudni, elvégre Stephenson gőzmozdonya, a Rocket is forradalmat csinált, pedig azt egy mai versenybiciklivel is röhögve meg lehetne előzni.
Bár a PR2 még a csomókötéssel is nehézkesen boldogul, megtudhatjuk, hogy a tervezők szerint a robot orvosi beavatkozások során, például műtéteknél is használható lehet. A demonstrátor a rémült arcokat látva igyekszik mindenkit megnyugtatni: a gép csak asszisztensként segítené az orvos munkáját, nem helyette végezné el a beavatkozást. Egyelőre tehát nem kell attól tartanunk, hogy egy bejárónőként működő Terminátor szoftverhiba miatt ellenünk fordul.
Kövesse az Indexet Facebookon is!
Követem!



