Robotblog
Piruettezik az első saját robotunk
[Elindultunk egy jótékonysági robotépítő versenyen, ennek keretében május elejéig kell terveznünk és építenünk egy szerkezetet a Lego robotépítő készletéből.]
Elkészült az első olyan robot, aminek a leírása nem a kézikönyvben volt, és nem is a netről töltöttük le a terveit, hanem magunk találtuk ki és készítettük el. Tanulmányrobotról lévén szó sok értelme ugyan nincs, de ezen is tanultunk egy-két apróságot. Például ennél úgy használtuk fel a négy kereket, hogy a szomszédos kerekek tengelyei derékszöget zárnak, és a négy tengelyt egyetlen fogaskerék hajtja.
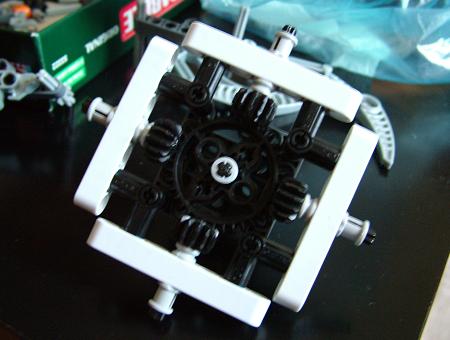
A robot így persze csak egy helyben tud forogni, de azt a központi egység utasításainak megfelelően teszi. Ez ugyanis a másik trükk, amit kipróbáltunk: a központi egység ebben a robotban mint távirányító szerepel. A „jobbra” gombra jobbra forognak a kerekek, a „balra” gombra balra forognak. Rögtön látszik, mi a megoldás nagy hátránya: 50 centis a leghosszabb drót, amit a készlethez adtak, így a távirányító nem igazán érdemli ki a „táv” előtagot. Meg egyáltalán, csúnya ez a drótösszeköttetés. A központi agyat bluetoothon keresztül is lehet kommandírozni, itt az ideje, hogy utánanézzünk, hogyan.
Robotunk elalszik, majd táncra perdül
Rövid összefoglaló azok kedvéért, akiknek új lenne ez a blog: indultunk egy jótékonysági robotépítő versenyen, ennek keretében május elejéig kell terveznünk és építenünk egy szerkezetet a Lego robotépítő készletéből. Ezt a hetet azzal töltöttük, hogy megismerkedtünk a készletből építhető alaprobotokkal: a golyót tapsra visszahozó TriBottal, a skorpiószerű Spike-kal, majd a színeket megkülönböztető robotkarral a RoboArm T-56-tal.
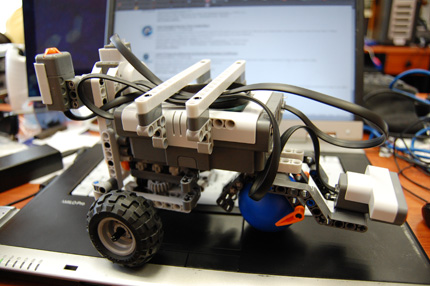
Mai amatőrvideóink főhőse pedig a humanoid Alpha Rex, a készlet utolsó (egyben legbonyolultabb) alaprobotja. Bonyolult áttétekkel és két motorral át tudja helyezni a súlypontját és csoszogó járással haladni is képes, a harmadik motorral pedig karjait és fejét mozgatja. A karok végén nyomás- és hangérzékelő található, a távolságérzékelő a robot feje, a fényérzékelő pedig a hátán kapott helyet. Több programot is kipróbáltunk Alpha Rexen, az alábbival a kijelző tartalmának változtatását próbálgattuk (sajnos nem nagyon látszik a videón). A robot a fényérzékelő eltakarására elalszik és Z betűket jelenít meg a kijelzőn, ha pedig újra fény éri az érzékelőt, jó reggelt kíván és kirajzol egy szmájlit.
Az alábbi videón pedig a robot mozgását lehet megcsodálni, amint Kraftwerkre (mi másra?) táncol. A nyomásérzékelővel beindítjuk Alpha Rexet, aki eleinte még csak a lábain dülöngél, de amikor meghallja a We are the Robotsot (azaz a karján levő hangérzékelő érzékeli a hangos zenét), a karjait és a fejét is mozgatni kezdi a maga öreguras módján.
Színeket lát a robotunk
Az alapkészlet következő alaprobotja a RoboArm T-56, ami annyira nem látványos, mint a skorpiórobot, de fontos trükköket tanultunk meg rajta. Például végre használhattuk a Nagy Fogaskereket, amin a kar körbefordul, és jó kis megoldásokat láttunk arra, hogy a motor teljes fordulataival milyen áttétek révén lehet egészen kicsi mozgásokat elérni. Egyedül a kis fekete fogaskerékkel nem vagyunk kibékülve. Mint egy korábbi postban írtuk, elvileg ezzel lehet egy vízszintes tengelyű hajtáshoz egy függőlegest kapcsolni, de hajlamos a kis kerék ugrani egyet, és ilyenkor a szerkezet csak recseg, de nem mozdul.
A RoboArm egyébként olyan kar, amivel a készlet tesztlabdáit lehet megfogni. Egy motor forgatja köbe a kart, egy emeli és süllyeszti, egy pedig a kar végén levő fogószerkezetet nyitja-zárja. Az érzékelők közül csak a nyomásérzékelőt és a fényérzékelőt használja a kütyü: az előbbi azt figyeli, hogy van-e valami a fogószerkezetben, utóbbi pedig a megragadott tárgy színét. Kipróbáltuk azt is, milyen hangokat tud kiadni a központi egység. Elég halkan beszél, de azért talán hallani majd a videókon. Itt például azt mondja a piros labdára, hogy „red”, majd programjának megfelelően leemeli a labdát az állványról:
A kék labda már nem tetszik neki, de azért felismeri, hogy a labda „blue”:
És jöjjön egy elrontott jelenet: amikor még nem volt elég magasan a labda, a robotkar csak rombolt. Átverni azonban nem lehetett, a levegőt markolva közölte, hogy „no object”.
Támad a skorpiórobot
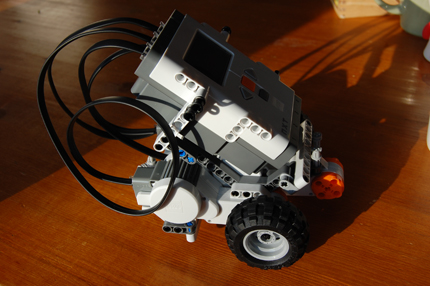
A TriBot után a készlet következő alaprobotja, amit megépítettünk, Spike volt, a skorpiórobot. Ez a jószág a három motor mellett csak a nyomás- és a távolságérzékelőt használja, viszont nagyon príma mechanikai megoldások találhatók rajta. Az egészen állatszerű mászást például úgy oldották meg az ismeretlen mérnökök, hogy egy motor egy mozgó vázelemet hajt, ami három kis bütykön billenti előre a törzset (a hat lábszerű képződmény csak optikai tuning). Mindkét oldalon található egy ilyen vázelem, és a motorok egy ütemben működnek, szóval ez a robot nem tud kanyarodni (bár lehet, hogy csak programozás kérdése lenne ezt megoldani, majd kipróbáljuk).
A harmadik motor a skorpió farkát lendíti előre - ez a farok egyébként szintén frappáns mechanikai megoldás, máris elképzeltük, hogy ellopjuk a sört-a-kanapéhoz-hozó robotunkhoz. A farok végén nyomásérzékelő figyeli a „találatot”, az állat feje pedig a távolságot sasoló ultrahangos detektor. Spike programja annyiban bonyolultabb a TriBoténál, hogy már elágazások is vannak benne: a skorpió meg előre, amíg valaki meg nem közelíti, akkor ugyanis megijed és hátrálni kezd. Ha pedig még tovább közelítünk hozzá, harciasan szúr egyet a farkával. Valahogy így:
Spike hatására persze rögtön elkezdtünk harcirobotokban gondolkodni, szóval az is lehet, hogy a versenyen valamilyen önmegsemmisítő birodalmi kutászdroiddal indulunk.
Első bénázásaink a robottal
Hétvégén végre nálam volt a robotépítő készlet (ez a hátránya annak, ha az ember munka mellett, otthon vesz részt egy ilyen projektben, egyszerre csak egyikünk tud dolgozni a robottal). Balage kolléga után én is megismerkedtem az alkatrészekkel, összeraktam a készlethez mellékelt lemezen részletesen leírt robotokat. A héten ezekről a tapasztalatokról számolunk be, miközben továbbra is füstölő agykéreggel próbáljuk kitalálni, mi legyen a versenyre elkészülő robot.
Az első alaprobot a TriBot, egyszerű és könnyen elkészíthető konstrukció, ami kihasználja a készlet összes érzékelőjét és motorját. A robot kerekeit külön motorok hajtják (így tud kanyarodni), a harmadik motor a robot karjait mozgatja. A program szerint TriBot békésen áll a tesztpadon, amíg elé nem rakjuk a kék labdát. Ekkor a robot ultrahangos érzékelőjével észreveszi, hogy előtte van a labda, és odagurul hozzá (amíg a nyomásérzékelő meg nem állítja). Ezután tapsra (ezt nyilván a hangérzékelővel figyeli) megragadja a labdát és visszahozza (a fényérzékelő pásztázza a talajt, hogy hol a fekete vonal, ahol meg kell állnia). Nagyjából ötödik alkalommal sikerült is ezt lefilmeznünk, íme:
Az előző öt alkalommal látványos bénázások voltak TriBottal, ugyanis (a gyári programnak megfelelően) a kütyü túl gyorsan csattintja össze a karjait: sokszor előfordult, hogy leverte a labdát az állványáról (kis öröm, hogy már tudjuk, hol lehet ezen finomítani). Egy alkalommal pedig el is akadt az állványban és lerohant a tesztpadról, ezt a bakit is megörökítettük:
Recsegnek a robot fogaskerekei
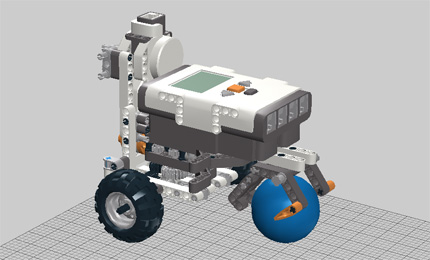
Most úgy látjuk, hogy hiába írunk kiváló szoftvert, és hiába tervezzük majd meg milliméterre pontosan a szerkezetet, ha a műanyag fogaskerekek simán megakadályozhatják a robotunk működését. Félő, hogy még a verseny vége előtt ledarálunk néhány gyengébb alkatrészt. Az Unibotnál például a kerekeket meghajtó fekete fogaskerekek sokszor csak elcsúsztak egymáson, a robot kerregett, és egy millimétert sem moccant. Az alábbi képen látható az elméletileg működőképes, a gyakorlatban azonban igen gyenge szerkezet.

Egyébként az ingyen letölthető Lego Digital Designer nevű program nemcsak betölti a mások által kreált modelleket, de még építési útmutatót is tud generálni. Igaz az Unibot esetében előfordult, hogy néhány elem a levegőben lebegett, mert az összekötő elemek csak húsz lépéssel később kerültek a helyükre.
Segédanyag, indulók
Frissült a Nextwork verseny honlapja. Egyrészt kikerült rá egy részletes oktató anyag, amolyan „legórobot for dummies” (amiért nem győzünk eléggé hálásak lenni), másrészt a versenyen induló csapatok neve. Ez utóbbi listát nézegetve megerősödött bennünk az elhatározás, miszerint nem győzni akarunk, hanem pusztítani szórakozni és tanulni.
Egyébként ma véletlenül összefutottam a verseny egyik szervezőjével, aki azt mondta nekem, hogy arra számít, az iskolák nagyon jó ötletekkel és robotokkal állnak majd elő, a cégek pedig alulmaradnak, mivel nekik munka mellett kellene csinálniuk mindent. Van igazság abban amit mond, legalábbis a héten nagyon éreztük, hogy a CeBIT miatt nincs időnk foglalkozni a robotunkkal. Amiről még mindig nem tudjuk, mivel fogja lenyűgözni a zsűrit.
Építsünk szkennert? Hülyítsünk macskát?
Mint korábban írtuk, elindultunk egy robotépítő versenyen, és olvasóink tippjeit várjuk, milyen robotot építsünk a készletből, amit kaptunk. Születtek már jó ötletek, de hogy a további agyvihart segítsük, következzen néhány videó és konkrétum.
A készletben egészen pontosan ezek az elemek találhatók. A lényeg a majdani robot agya, a programozható központi egység, illetve a hozzá köthető érzékelők: egy fényérzékelő, egy hangérzékelő, egy érintésérzékelő, és egy ultrahangérzékelő (ez utóbbival távolságot és mozgást lehet figyelni). A mozgásról szervomotorok gondoskodnak, ebből sajnos csak három található a dobozban, szóval ilyen faja kis robotteknőst biztosan nem fogunk tudni építeni:
A központi egységet lehet programozni akár C programozási nyelvben is, így egészen bonyolult rutinokat is bele lehet verni a robot kockafejébe, mint azt a lenti, Rubik-kockát kirakó robot mutatja:
A vonalkövetés viszonylag egyszerű feladat a robot számára, jó példa erre ez a Sokoban-pályát megoldó robot:
A fényérzékelővel a színeket is meg lehet különböztetni, ezt használja ki az alábbi szortírozórobot:
Elképzelhető persze, hogy nem a robot kevésbé látványos adatgyűjtő funkciót lát el, mint a lenti 3D-szkenner:
És persze teljesen haszontalan alkalmazásokra is szívesen fogadunk ötleteket. Ez a macskahülyítő robot például belopta magát a szívünkbe:
Nem is beszélve az egyensúlyozó robotról:
Csökkenti a magányt a robottárs

Wir sind die Roboter
„Já tvoj szlúga, já tvoj rábotnyik…” Természetesen Kraftwerket hallgatunk, miközben próbáljuk kitalálni, hogy mérnöki géniuszunk milyen terv szerint manifesztálódjon legóelemekből, szervómotorokból és érzékelőkből összegyúrt teremtményünkben. Jó szívvel és jó processzorral ajánljuk mindenkinek ezt az 1977-es klipet:
Segítsen robotot építeni nekünk!
Elindultunk egy jótékonysági robotépítő versenyen (a részleteket lásd az első postban), de még mindig nem tudjuk, milyen robotot – vagy akár robotokat – gyártsunk a kapott készletből. Volt ugyan néhány csodálatosan haszontalan ötletünk és néhány olyan is, amit Kovi pironkodva húzna ki egy pornófilm forgatókönyvéből, de nem tudtuk eldönteni, hogy multifunkciós kéjautomatát konstruáljunk, olyan robotot, ami megfőzi és felszolgálja a reggeli kávét, vagy Vucli Tóbiás találmányát, az önműködő villamosjegyet.
Olvasóink ötleteiben és fantáziájában bízunk: írják meg a kommentekben, önök szerint milyen gépezettel szerencséltessük a magyar iskolákat! Bármilyen tipp jöhet, teljesen laikusoktól és robotépítésben jártas veteránoktól egyaránt. A későbbiekben is szívesen fogadunk minden észrevételt - célunk, hogy a projekt végére minél nagyobb tudásbázist tudjunk átadni az iskoláknak, de addig is remekül szórakozzunk, önökkel együtt.
Kezünkben az NXT
Indul a robotverseny
A Mindstorms NXT készletet az oktatásban is szívesen használják, mivel a műanyag elemekből gyorsabban összerakható egy robot, mintha fém alkatrészeket kellene összekovácsolni. A NextWork versenynek is az a fő célja, hogy az iskolákba minél több ilyen robot kerüljön, és a diákok megismerjék a robotikát.
Vállalkozásként két készletet kaptunk, az egyiket a saját munkánkhoz, a másikkal pedig egy iskolai csapatot támogatunk, amely így ingyen részt vehet a versenyben. Sőt a verseny végén a saját robotjunkat is felajánlhatjuk egy iskolának. A diákok és a cégek külön kategóriában versenyeznek, a pályamunkákat május 2-án kell leadni. Az eredményhirdetés után mindegyik robotot kiállítják a Jövő Házában, szeptemberben pedig az alkotások végleg az iskolákhoz kerülnek.
A Mindstorms NXT központi egysége számítógépről programozható, a készletben van három szervómotor, egy ultrahangos érzékelő, egy fényérzékelő, egy hangérzékelő és egy érintésérzékelő. Plusz fogaskerekeket és más készletből származó elemeket nem használhatunk fel; semmit, amivel befolyásolni tudnánk a robot funkcionalitását. Persze bármivel feldíszíthetjük a robot csupasz a műanyag vázát, és ha a robot célja a reggeli újság behordása, akkor adhatunk a kezébe újságot.
Állítólag tizenévesek is simán tudják programozni az NXT-t, ami nagy szerencse, csapatunk tagjai ugyanis még soha nem raktak össze egy szabvány legóembernél összetettebb humanoidot. A Málenkij Robot blogban nyomon követhetik próbálkozásainkat, és a következő két hónapban megpróbáljuk széles körben bemutatni a robotikát.